無人運転の事例を紹介します。
1.GPSを使用する
屋外でGPS(GNSS)を使用する場合は、GPS地点を設定して無人運転が可能です。
以下の写真の車は、屋根にGPSを搭載しています。

GPSローバー
2.カメラを使用する
カメラを使用する場合は、人工知能AIのディープラーニングで走行経路を学習させて無人運転が可能です。
>>ディープラーニングを使ったラジコンカーの自動運転(ドンキーカー)はこちら
以下の写真の車は、フロントガラスの上部にカメラを搭載しています。

自動運転中のラジコンカー
>>AIカーJetBotによる衝突回避と物体追従はこちら
以下の写真の車は、前方にカメラを搭載しています。

JetBotのカメラマウントを高く変更
3.LiDAR(ライダー)を使用する
LiDAR(ライダー、「light detection and ranging(光による検知と測距)」)を使用する場合は、地図を作成して無人運転が可能です。
差動駆動方式のAMR(自律移動ロボット)です。
直径17cmのハブモータ(エンコーダ内蔵)、モータドライバ、インテルNUC、バッテリー、LiDAR搭載。
ROS2 foxy対応。

はじめカート

はじめカート(後方)
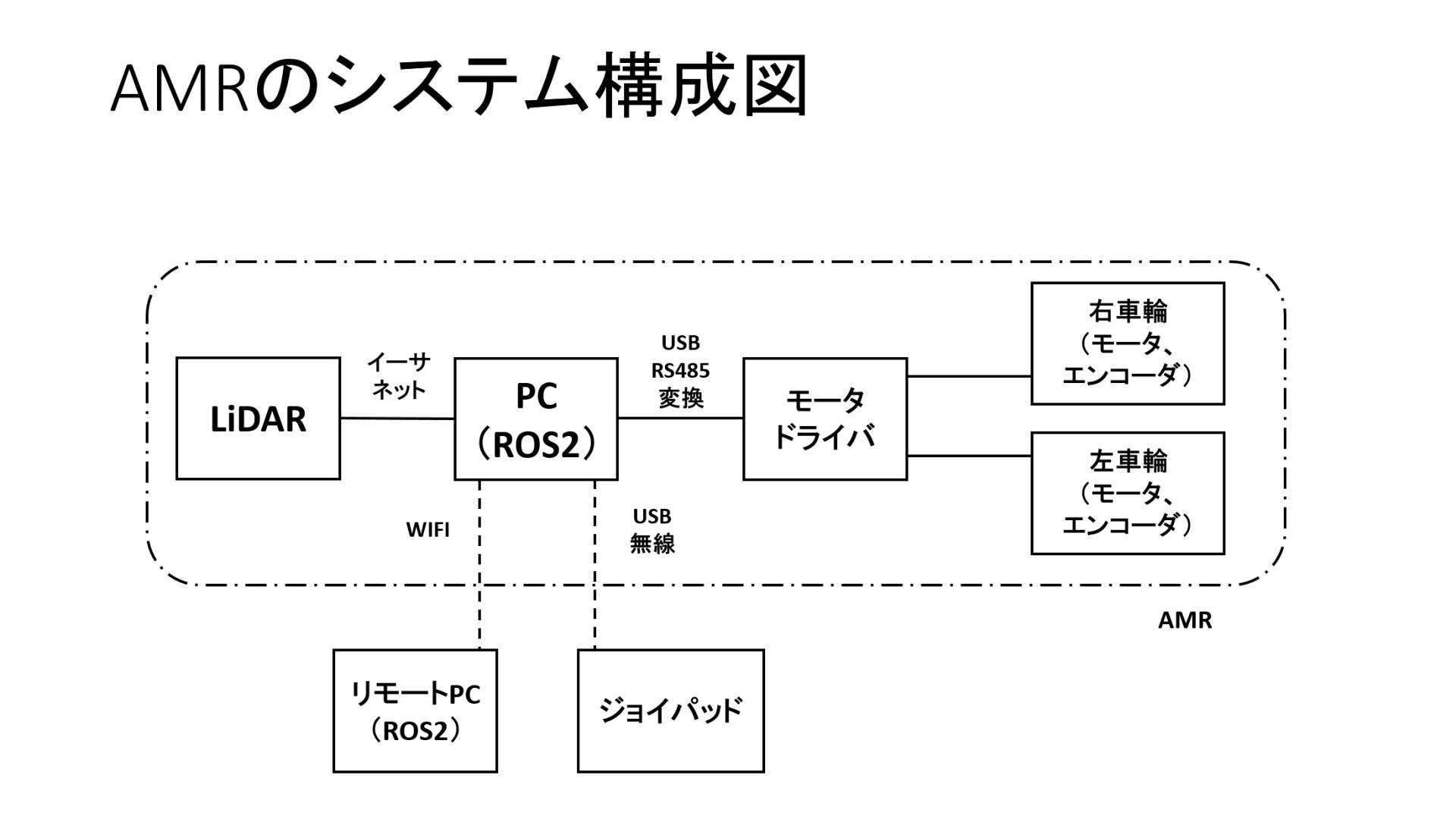
AMRのシステム構成
>>ロボットカートのナビゲーションはこちら
ロボットカートを使って部屋の2D地図を作成します。
地図上で目標位置・向きを指定して、そこまでロボットカートを自動運転させます。経路上に障害物があっても、それを避けてロボットカートが移動します。

ロボットカートをナビゲーションで動かす