大型ヒューマノイドロボットの関節に使用しているサーボモータを制御するため、ロボット本体に搭載可能な小型のモータ制御基板を開発しました。 ブラシレスDCモータ(BLDCモータ)や、DCモータ(ブラシ付きDCモータ)を駆動できます。電流制御(トルク制御)、速度制御、位置制御(角度制御)のフィードバックループを構成しています。RS485シリアル通信を使用したネットワーク接続が可能であり、ヒューマノイドロボットの関節を駆動する複数台のモータをマイコンやPCから制御することができます。
ブラシレスDCモータ制御基板
-

- ブラシレスDCモータ制御基板
-

- ブラシレスDCモータ制御基板
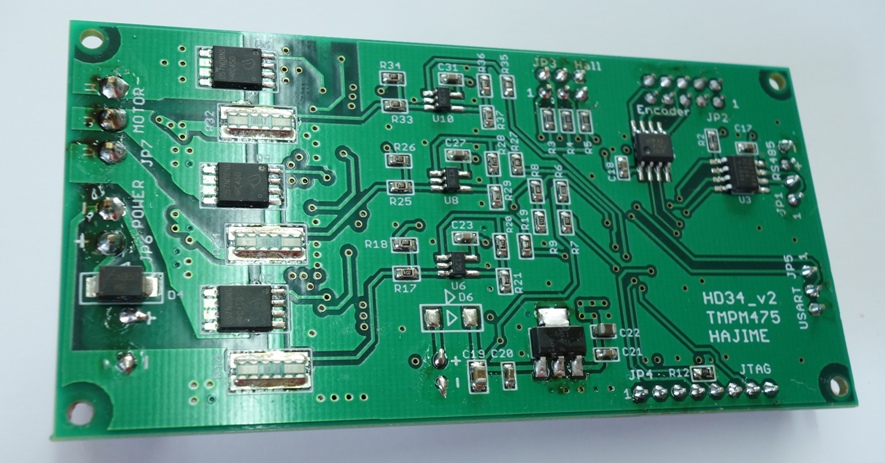
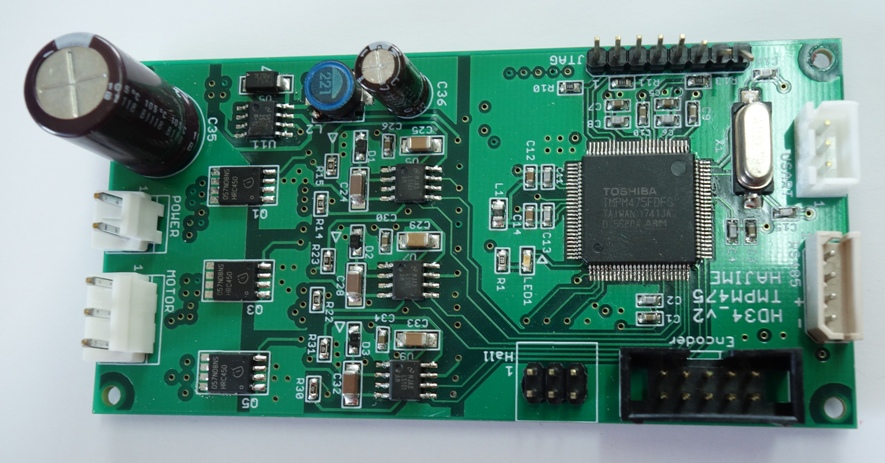
ロボットの関節を駆動するために使用している小型サイズのブラシレスDC(BLDC)モータ制御基板です。ベクトル制御を採用し高効率でなめらかな回転が実現できます。電流制御、速度制御、位置制御のフィードバックループで構成されており、高速応答かつ精密な制御が可能です。コンプライアンス制御でトルクを設定することにより位置制御のやわらかさを変えることができます。出力100ワット程度までのブラシレスDCモータに対応しています。CPUは、東芝製のアドバンストベクトルエンジン(A-VE)搭載のTMPM475を使用しています。通信はRS485に対応しています。基板サイズは48.3×96.5mm。
試験データ
以下のグラフはブラシレスDCモータの電流制御の試験データです。三相の電圧指令波形、測定された三相の正弦波状の電流波形、電流応答(トルク制御)の波形です。
-
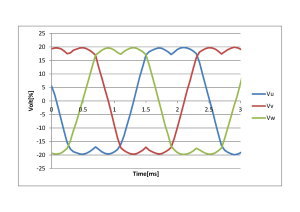
- 三相電圧指令波形
-
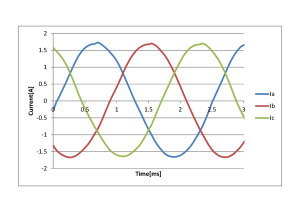
- 三相電流波形
-
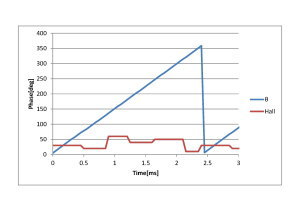
- 位相とホールセンサ
-
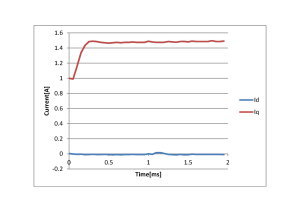
- Iq、Id電流波形
参考本
東芝製マイコンのベクトルエンジンに関する説明が書かれている本です。私も関わっています。
amazonの商品ページへのリンク
ブラシレスDCモータのベクトル制御技術
DCモータ制御基板

DCモータ制御基板
ロボットの関節を駆動するために使用している小型サイズのDCモータ制御基板です。電流制御、速度制御、位置制御のフィードバックループで構成されており、高速応答かつ精密な制御が可能です。コンプライアンス制御でトルクを設定することにより位置制御のやわらかさを変えることができます。出力70ワット程度までのDCモータに対応しています。CPUは、東芝製のベクトルエンジン(VE)搭載のTMPM370を使用しています。通信はRS485に対応しています。基板サイズは48.3×96.5mm。