マイコンとレゴを使ったロボットカーの開発
「マイコンとレゴを使ったロボットカーの開発」オンライン講座はこちら(外部サイト)>>
マイコンとレゴを使ったロボットカーの開発
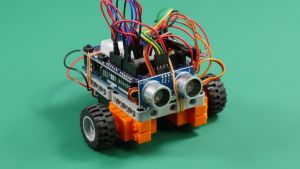
アルディーノ(Arduino)マイコン、おもちゃのブロック「レゴ(LEGO)」、超音波距離センサーを使って、障害物をよけて進むシンプルなロボットカーを製作します。
Kindle本を出版しました。
マイコンとレゴを使ったロボットカーの開発: Arduinoを使った電子工作
学習内容
シンプルなロボットカーの仕組み
マイコンボードの使い方
電子部品の使い方
電子回路図の読み方
ブレッドボードを使った電子部品の配線方法
マイコンのプログラミング
複数の電子部品を組み合せたプログラミング
レゴを使ったロボットカーの車体の組み立て方
自動走行のプログラミング
障害物をよけるプログラミング
講座内容
このコースでは、マイコンボードと「レゴ(LEGO)」を使ってシンプルなロボットカーを製作します。
車に、センサーを搭載して、マイコンボードにプログラミングをして、自分で障害物をよけるロボットカーを作ります。
マイコンボードは、使いやすくて定番の「アルディーノ(Arduino)」を使います。
ロボットカーの車体は、おもちゃのブロック「「レゴ」を使って組み立てます。そのため、車体の製作に工具は必要ありません。
電子部品の配線には、ブレッドボードを使います。そのため、電子回路の製作に、はんだ付けは必要ありません。
360度回転するサーボモータで、タイヤを回転させて、ロボットカーを走らせます。
超音波距離センサーを使って、非接触で、前方の障害物までの距離を測ります。
これらの電子部品をマイコンボードに接続し、組み立てたロボットカーに搭載します。
ロボットカーが自分で判断して行動するプログラムを作成します。
プログラムを実行し、パラメータを調整して、障害物をよけて進むロボットカーの完成です。
はじめに、このコースと一緒にロボットカーの製作を体験するために、準備するものを学びます。
次に、アルディーノについて学びます。アルディーノのソフトウェア開発環境を、パソコンにインストールします。
そのあと、障害物をよけて進むロボットカーを開発していきます。
- ロボットカーの仕組みを学びます。
・ロボットカーを組み立てます。 - ロボットカーのタイヤを回します。
・ポテンショメータの使い方を学びます。
・サーボモータの使い方を学びます。
・ポテンショメータとサーボモータを、マイコンボードに接続する電子回路を学びます。
・ポテンショメータとサーボモータを、マイコンボードに配線します。
・サーボモータのPWM信号を変えるプログラミングをします。
・プログラムを実行して、右左のタイヤをそれぞれ独立に回して、ロボットカーがどのような方向に動くのかを確かめます。 - ロボットカーに自動走行させます。
・自動走行するロボットカーのプログラミングをします。
・プログラムを実行して、ロボットカーが、前進、後退、右回転、左回転、と自動走行するのを確かめます。 - 超音波距離センサーで距離を測ります。
・超音波距離センサーの使い方を学びます。
・超音波距離センサーを、マイコンボードに接続する電子回路を学びます。
・超音波距離センサーをマイコンボードに配線します。
・超音波距離センサーで距離を測るプログラミングをします。
・プログラムを実行して、超音波距離センサーで距離が測れるのを確かめます。 - ロボットカーに障害物をよけさせます。
・障害物をよけるロボットカーのプログラミングをします。
・プログラムを実行して、障害物がなければロボットカーは前進、障害物があればロボットカーは右回転して障害物をよけるのを確かめます。障害物をよけるパラメータを調整して、ロボットカーの完成です。
このコースの対象受講者
-
- アルディーノやマイコンで、簡単な電子工作を経験したことがある初級者。
- マイコンボードを使ってロボットを作りたい人。
このコースで使用する部品
この360度回転サーボモータは、ケースの形が、レゴと組み合わさるように作られています。
amazonの商品ページへのリンク
4個Geekservo Servo プログラム可能な360°連続回転サーボ(Lego Micro:bit レゴと互換性があります)DIY技術構築レンガ