ロボットに適用できる人工知能(AI)の中で、主に、ディープラーニング(深層学習)の事例を紹介します。
1.画像認識
>>ディープラーニングを使ったラジコンカーの自動運転(ドンキーカー)はこちら
人工知能のディープラーニングを使って、ラジコンカーの自動運転をしてみました。

自動運転中のラジコンカー
AIカーが、床に敷いた板から落ちないように、また、障害物への衝突を回避して移動します。
AIカーが、人を検出して追従します。追従の間も障害物への衝突を回避しつつ、目標に向かって移動します。

JetBotのカメラマウントを高く変更
>>ディープラーニングによる画像分類(VGG16の転移学習)はこちら
>>畳み込みニューラルネットワーク(CNN)の中間層の出力を可視化はこちら
>>畳み込みニューラルネットワーク(CNN)のフィルタの可視化はこちら
>>畳み込みニューラルネットワーク(CNN)のヒートマップはこちら
2.物体検出
>>リアルタイム物体検出:ロボットの顔が人の方を向くはこちら
人工知能のディープラーニングの物体検出を使用しています。ヒューマノイドロボットに搭載したカメラ映像からリアルタイムに人を検出します。その検出結果を使って、人の方を向くようにロボットの顔を動かします。人が移動してもロボットの顔が追います。物体検出にはYOLOを使っています。
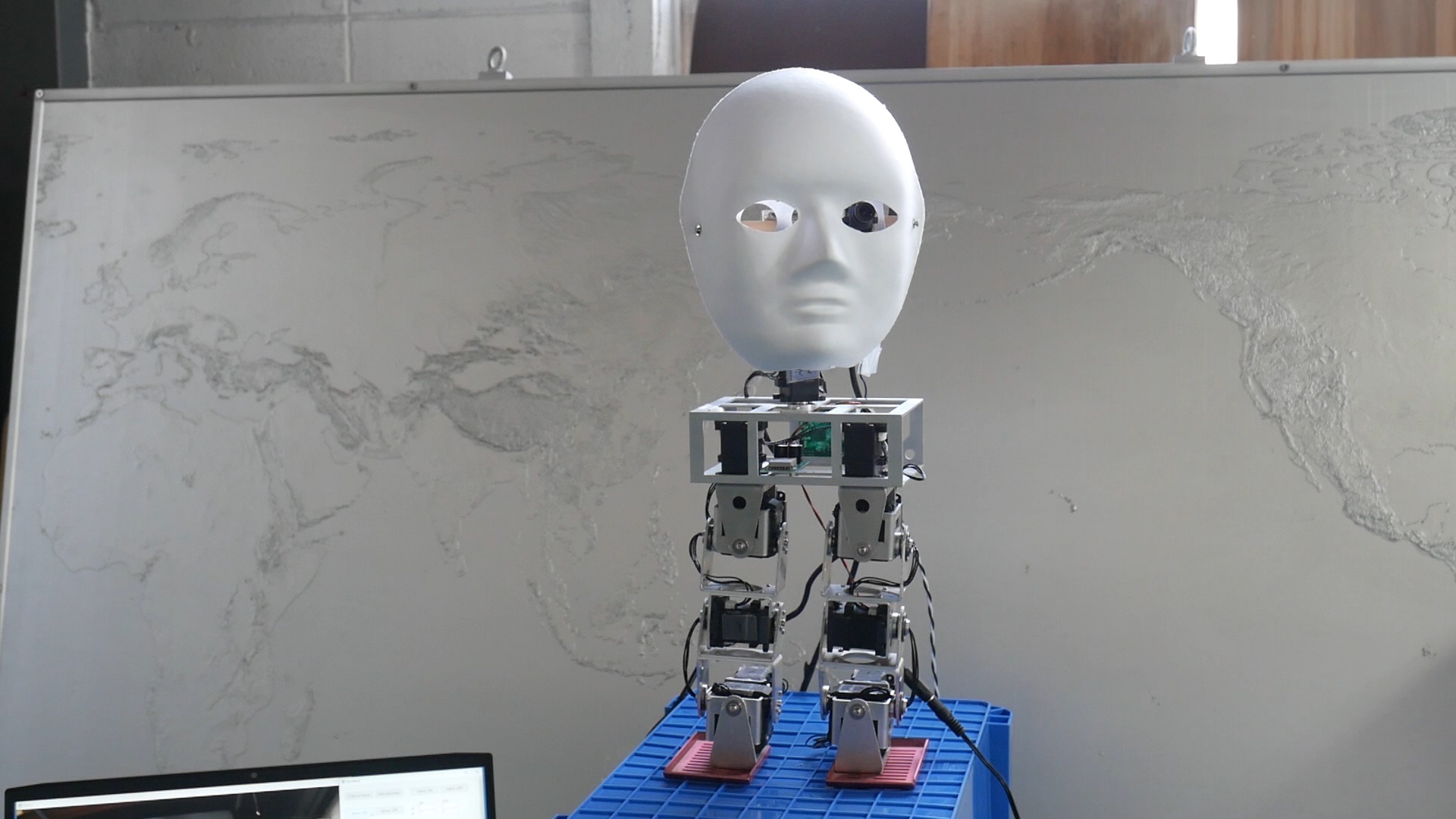
ロボットの顔が人の方を向く
>>物体検出に独自データを学習させるはこちら
人工知能の物体検出(YOLOv3)に独自データを学習させました。学習させるものとして、自分の顔を選びました(独自データで1クラスを学習する場合)。その後、自分の顔と、ロボットプロジェクトのメンバー3名の顔の合計4クラスで学習しました(独自データで4クラスを学習する場合)。