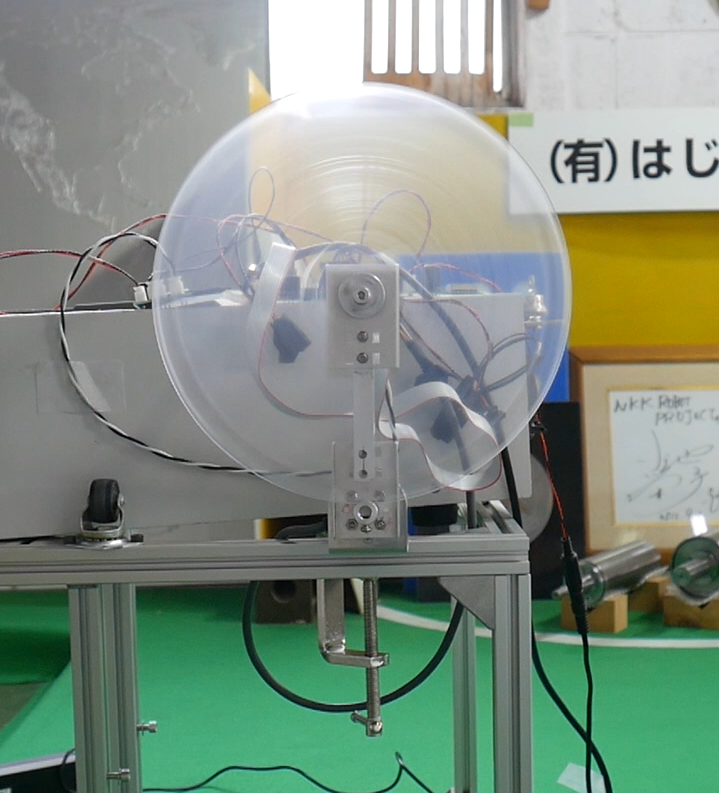
円板を回転させるときの反作用を使った「リアクションホイール」による倒立振子の姿勢制御(バランス制御)の試験を行いました。
リアクションホイール
説明
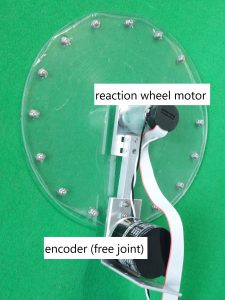
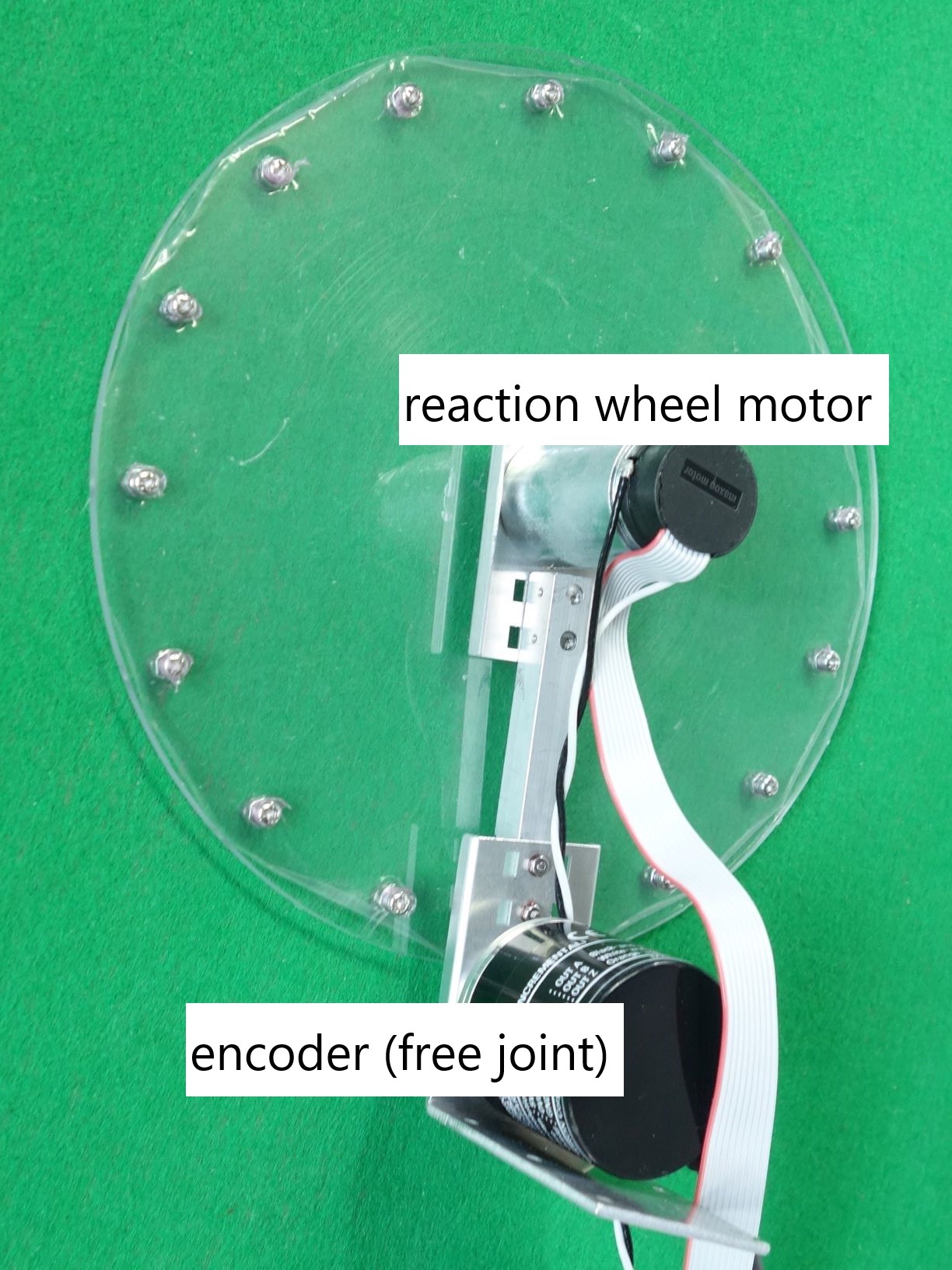
倒立振子のリンク下部の軸は回転フリーとなっています。そこには倒立角度を検出するためにエンコーダを取り付けています。リンク上部には制御用モータを取り付けています。制御用モータの出力軸にリアクションホイールの円板を取り付けています。制御用モータはエンコーダと一体型になっており、回転角度が検出できます。
-

- リアクションホイール

-
- リアクションホイール(裏)
制御方法
倒立振子のリンクの倒立角度(傾き角度)をエンコーダにて検出します。倒立角度とそこから計算した倒立角速度、それにリアクションホイールを取り付けた制御モータの回転角度と回転角速度の4つの状態から制御用モータの出力を決定します。最適レギュレータなどの制御理論を使いました。振子が傾くとリアクションホイールが回転して、その回転の反作用によって振子が元に戻る方向に動きます。振子が反対側に傾くとリアクションホイールは先ほどとは反対向きに回転して、その反作用によって振子が元に戻る方向に動きます。このようにして振子は倒立状態を維持します。また、リアクションホイールの回転速度が上昇しすぎるのを防ぐために、倒立角度を少しずらせる工夫をしています。
動画
リアクションホイールによる倒立振子の姿勢制御