 こんにちは、「はじめロボットチャンネル」の坂本 元(さかもと はじめ)です。
こんにちは、「はじめロボットチャンネル」の坂本 元(さかもと はじめ)です。
現役のロボットエンジニアです。重工メーカーを脱サラし、高校生のときに見たロボットアニメに憧れて、ヒューマノイドロボットや研究用制御システムの開発をしてきました。ロボワンやロボカップのロボットコンテストで優勝した実績があります。
これまで約20年間のロボット開発を通して、機械、電気、制御、プログラミングなど、多くの技術を学びました。
私は、ロボットアニメのロボットを作りたいという夢を目指して、多くの人とロボット技術を共有していきたいと考えています。
以下の、オンライン講座を開設しました(講座は、外部サイトudemyにリンクしています)。
【最短で学ぶ】配線なしで始めるアルディーノと電子工作入門
「【最短で学ぶ】配線なしで始めるアルディーノと電子工作入門」オンライン講座はこちら(外部サイト)>>

【最短で学ぶ】配線なしで始めるアルディーノと電子工作入門
Arduino(アルディーノ)のマイコンボードを使って電子工作を学びます。マイコンボードでLEDを点灯したり、センサーを使って測定したり、音を鳴らしたり、サーボモータを回したりします。
Kindle本を出版しました。
【Pythonではじめる】ラズベリーパイと電子工作入門
「【Pythonではじめる】ラズベリーパイと電子工作入門」オンライン講座はこちら(外部サイト)>>

【Pythonではじめる】ラズベリーパイと電子工作入門
最新のラズベリーパイ5に対応!(2024年8月) LED、フルカラーLED、スイッチ、ADコンバータ、ポテンショメータ、フォトレジスタ、温度センサー、人感センサー、サーボモータを動かす体験ができます。
Kindle本を出版しました。
アルディーノマイコンと電子工作入門
「アルディーノマイコンと電子工作入門」オンライン講座はこちら(外部サイト)>>

アルディーノマイコンと電子工作入門
Arduino(アルディーノ)のマイコンボードを使って電子工作を学びます。マイコンボードでLEDを点灯したり、センサーを使って測定したり、音を鳴らしたり、サーボモータを回したりします。
マイコンとレゴを使ったロボットカーの開発
「マイコンとレゴを使ったロボットカーの開発」オンライン講座はこちら(外部サイト)>>
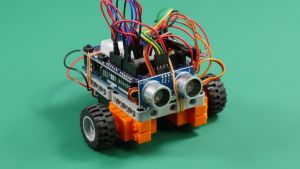
マイコンとレゴを使ったロボットカーの開発
アルディーノ(Arduino)マイコン、おもちゃのブロック「レゴ(LEGO)」、超音波距離センサーを使って、障害物をよけて進むシンプルなロボットカーを製作します。