自律移動ロボットは、AMR(Autonomous Mobile Robot)と呼ばれます。
LiDAR(ライダー、「light detection and ranging(光による検知と測距)」)を使用して、マッピングやナビゲーションが可能です。
地図を作成して、自己位置を認識し、目標位置までの経路を計画し、移動することができます。
この自律移動ロボット「はじめカート」は、差動駆動方式のAMR(自律移動ロボット)です。
特長は、直径17cmのハブモータ(エンコーダ内蔵)で駆動して、モータドライバ、インテルNUC、バッテリー、LiDARを搭載しています。
フレームサイズや形状、LiDARの型番、PCの種類、車輪径もカスタマイズ可能です。
サイズ幅360mm 長さ460mm 高さ344mm、重量約17kg
鉛バッテリとハブモータが重いので、これらを変更することで軽量化は可能です。
ROS2(ロボットオペレーティングシステム)のバージョン Humble (foxyにも対応)に対応しています。

はじめカート

はじめカート(後方)
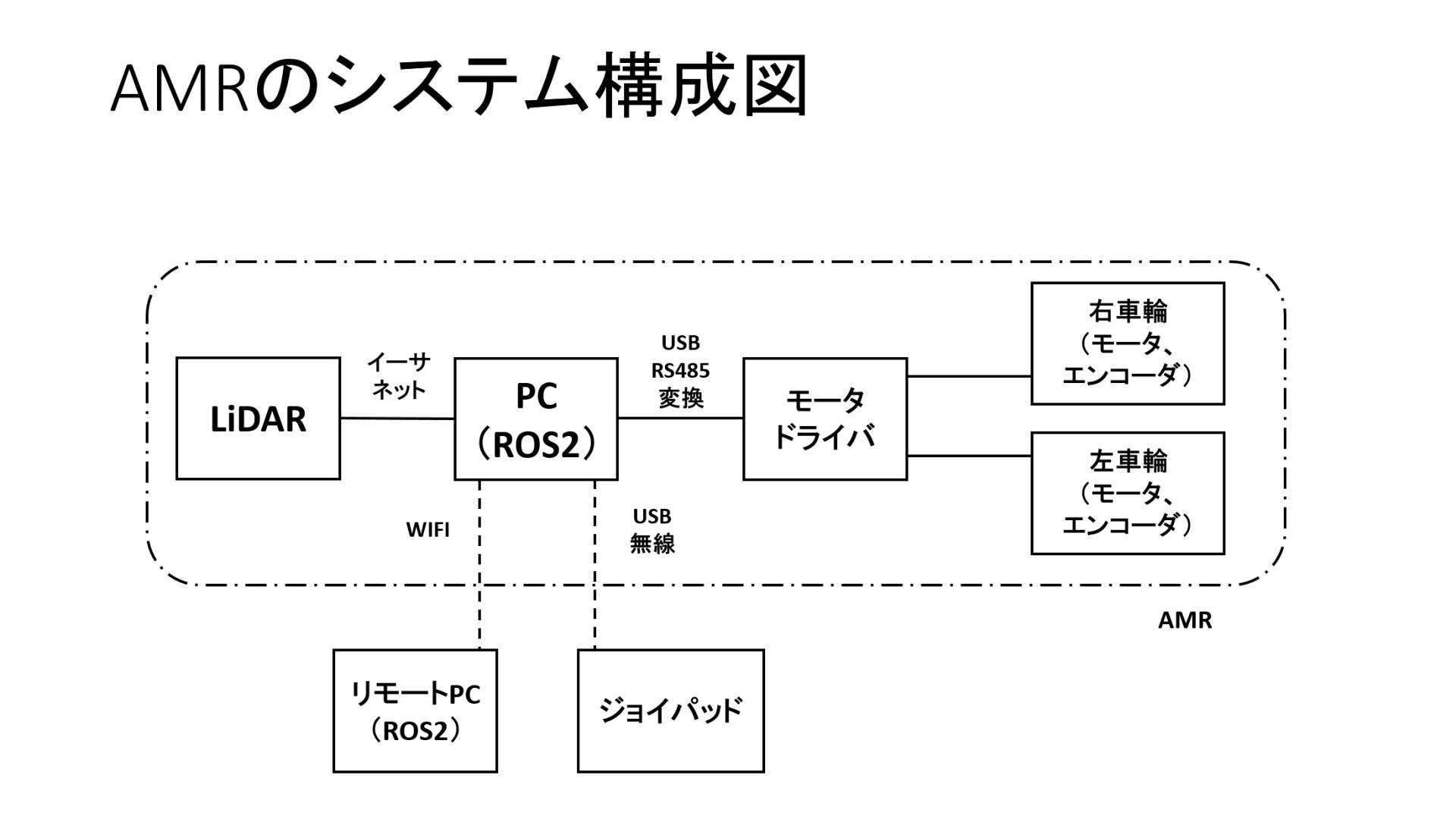
AMRのシステム構成
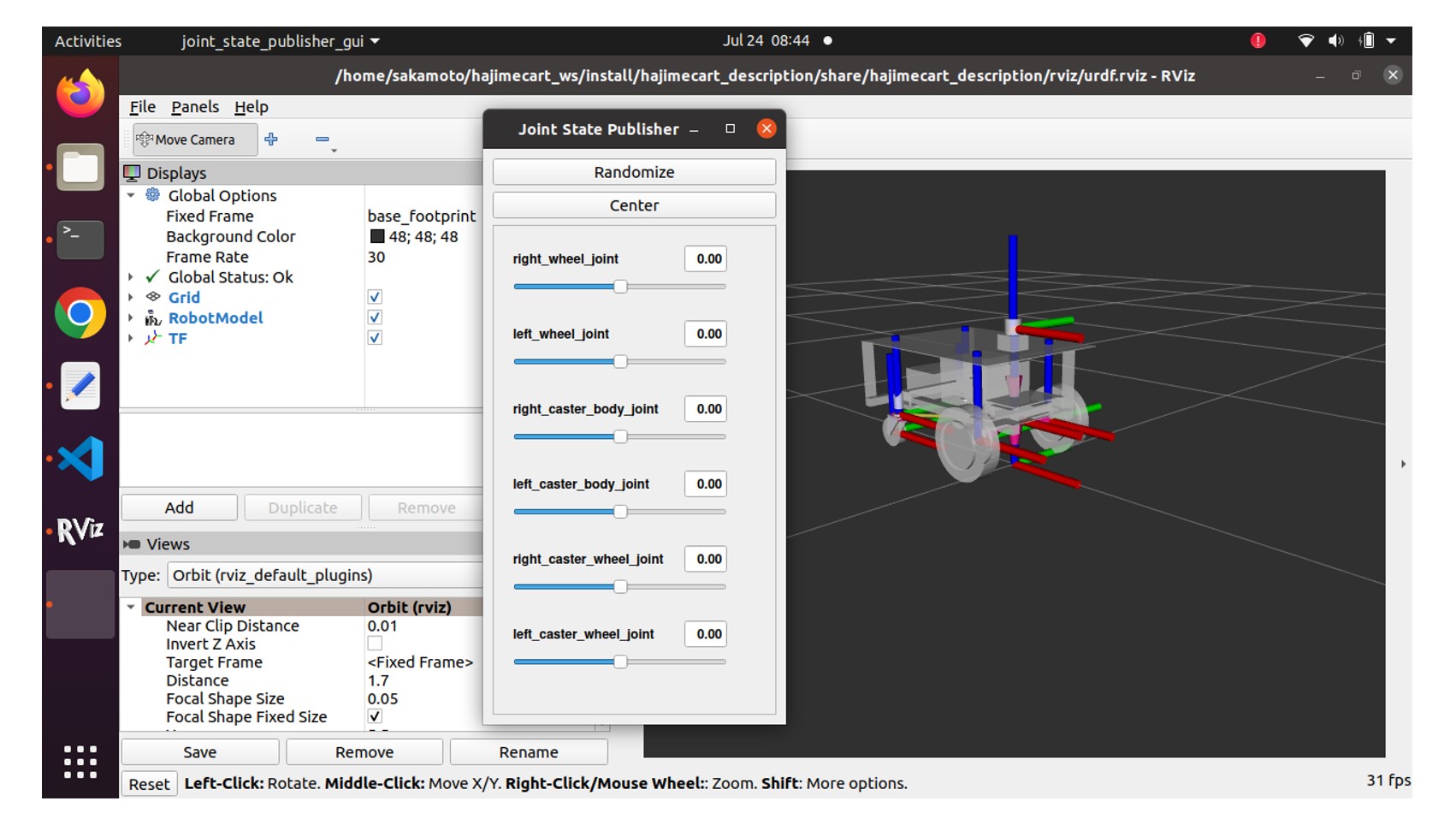
RViz2の画面(ROS2)
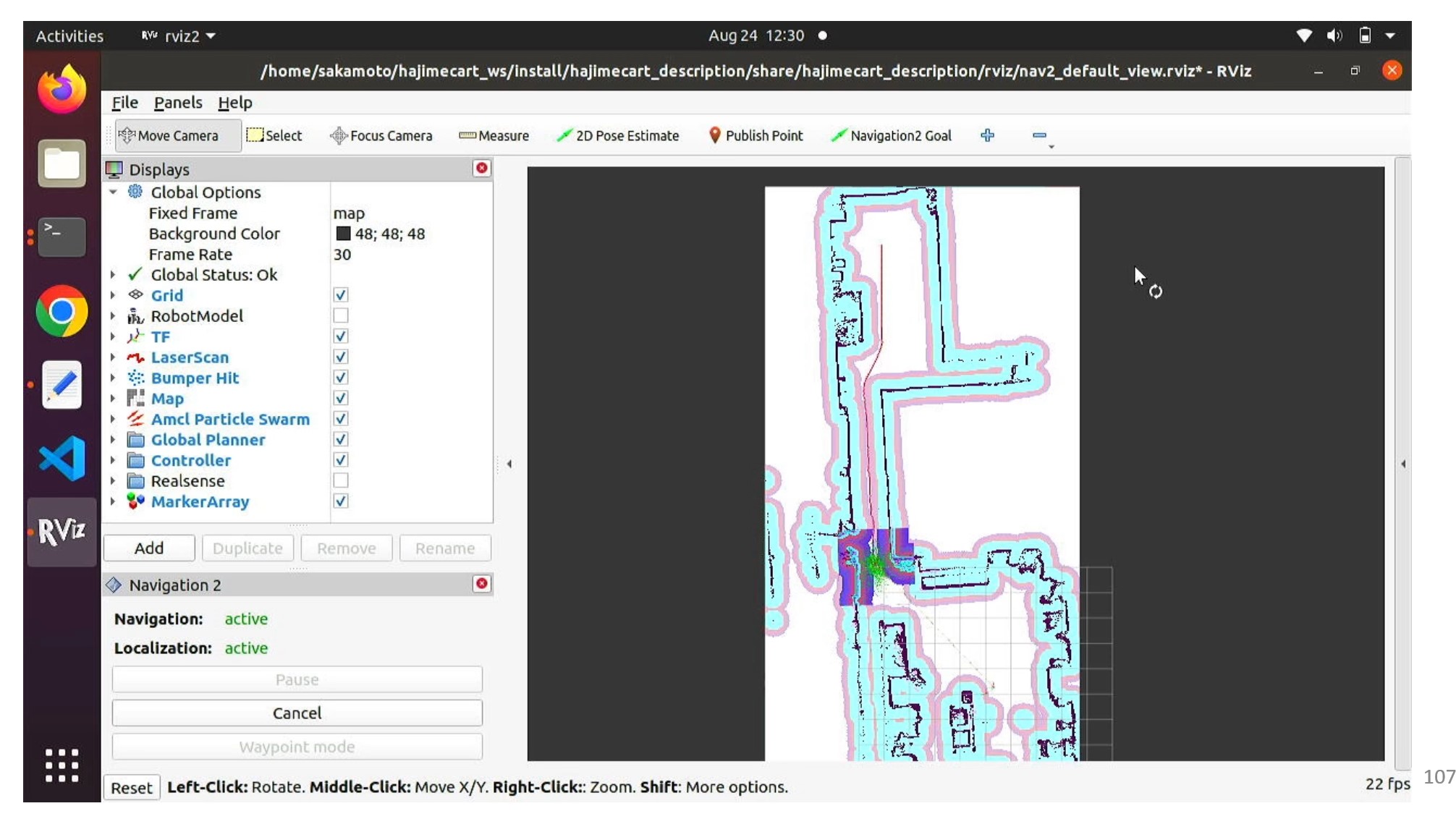
AMRのナビゲーション(RViz2の画面)

AMRのナビゲーション(実機)
動画
ROS2による自律移動ロボット(AMR)実機の地図作成
ROS2による自律移動ロボット(AMR)実機のナビゲーション
詳細内容
1)ROS2(ロボットオペレーティングシステム)のインストール