人間の身長と同等以上のサイズの大型ロボットは、非常に存在感があり、研究用途以外にエンターテインメント用ロボットとしても使用可能です。
ロボットのフレームは高剛性化かつ軽量化のためアルミ板金をBOX構造にしたものを使用しています。関節部にはオリジナルの大トルクのアクチュエータユニット(マクソンモータ+タイミングベルト+ハーモニックドライブ減速機)と、弊社オリジナルの小型モータ制御基板を使用しています。アルミ板金のBOX構造フレーム、専用アクチュエータユニット、小型モータ制御基板により、ロボット本体の重量を大幅に削減することに成功したのが、弊社の大型ヒューマノイドロボットの特長となっています。
小型・中型ロボットは、ホビー用途の市販サーボモータを使用しているので、精度や耐久性を重視する場合は、産業用モータを使用する大型ヒューマノイドロボットをお勧めします。
以下には、サンプルロボットとして「はじめロボット33号機」の仕様を掲載しています。
大型ロボットは受注生産になります。アカデミック用途につきましては、ロボット納品時にロボットの3D CADデータや、ソフトウェアのソースコードもご提供可能です。
-

- はじめロボット33号機
-

- かさ歯車式のアクチュエータユニット(25号機)・・・モータ軸とギア出力軸が直交しているため横幅を狭くできる
-

- ベルト式のアクチュエータユニット(33号機)・・・ハーモニック減速機+ベルト減速によりトルク増加を図っている。写真はモータの負荷試験中(負荷試験機はオリジナル)
-

- ブラシレスDCモータ制御基板
-

- DCモータ制御基板
>>ブラシレスDCモータ制御基板、DCモータ制御基板はこちら
仕様
| はじめロボット33号機 | |
| 全高 | 2100[mm] |
| 重量 | 20[kg] |
| 自由度 | 22 (脚: 12, 腕: 8, 頭: 2) |
| フレーム | アルミ板金(BOX構造), カーボンファイバーCFRP |
| アクチュエータ | サーボモータ (マクソンモータ、タイミングベルト、ハーモニックドライブ減速機、モータ制御基板、を組み合わせた専用のアクチュエータユニット) |
| センサ | ジャイロセンサ (3軸) 加速度センサ(3軸) |
| 運動制御コントローラ | はじめコントローラ HC (ARM Cortex-M4) |
| 自律制御コントローラ (オプション) | PCボード |
| カメラ (オプション) | 広角レンズのUSBカメラ |
| バッテリ (オプション) | リチウムポリマー(Li-Po) 33.3[V] |
| 運動制御コントローラの開発環境 | Cコンパイラ, RTM (リアルタイムモニタ), MLD (モーションローダ), C言語ソースプログラム |
| 自律制御コントローラの開発環境 (オプション) | Windows OS, Microsoft Visual Studio |
| 特長 | 高速歩行 全方向歩行 ボールキック動作 |
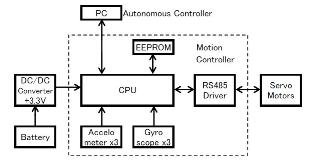
ヒューマノイドロボットのシステム構成
-

- 等身大ヒューマノイドロボット33号機の挨拶
-

- 等身大ヒューマノイドロボット33号機の調整の様子
-

- はじめロボット33号機を現代アート展に展示
-

- はじめロボット28号機
-
- はじめロボット25号機
動画