概要
オジリナルのロボットアームを設計・製作し、それをROSで動かします。
1)オリジナルの6軸ロボットアームを3D CADで設計します。
2)ROSの環境でロボットアームを表示したりシミュレーションしたりします。
3)ROSからロボットアームの実機を動かします。
2)ROSの環境でロボットアームを表示したりシミュレーションしたりします。
3)ROSからロボットアームの実機を動かします。
動画
ロボットアームの設計
3次元CADのSolidWorksを使用して、6軸ロボットアームを設計します。サーボモータにはROBOTIS社のダイナミクセルRX64(第1,2軸),RX28(第3〜6軸とハンド開閉)を使用しました。ロボットアームのフレームは、3Dプリンタで出力できるように樹脂で設計しました。
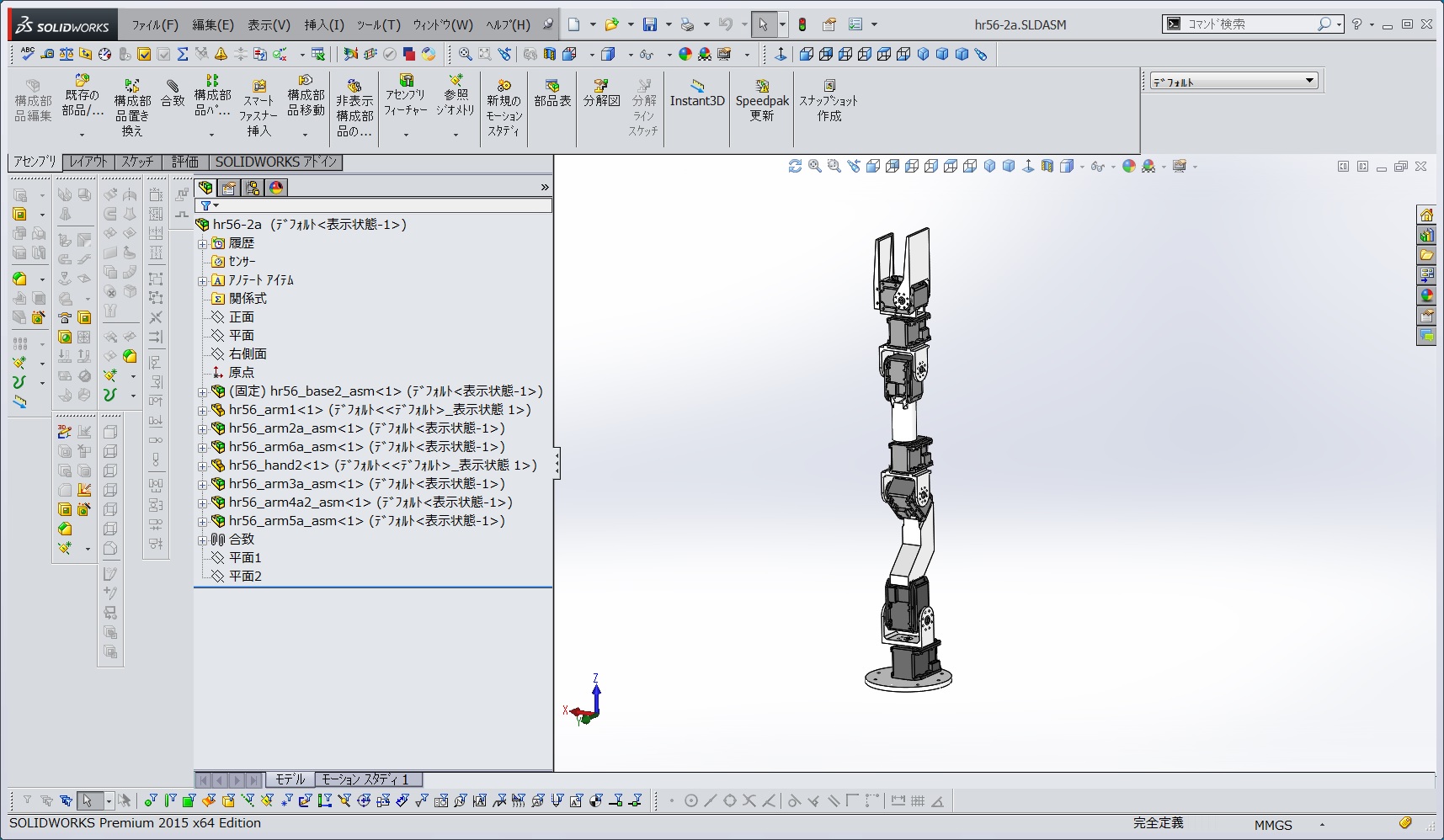
3D CADで設計中のロボットアーム(SolidWorks画面)
ROSではロボットをURDFで表現します。URDFにロボットのデータを渡すために、SolidWorksからパーツをSTL形式で出力します。出力フォーマットはバイナリです。
このとき、オプションにて、単位をメートル、座標軸をROSで組み立てやすい場所に設定してから、STLファイルを出力します。
このとき、オプションにて、単位をメートル、座標軸をROSで組み立てやすい場所に設定してから、STLファイルを出力します。
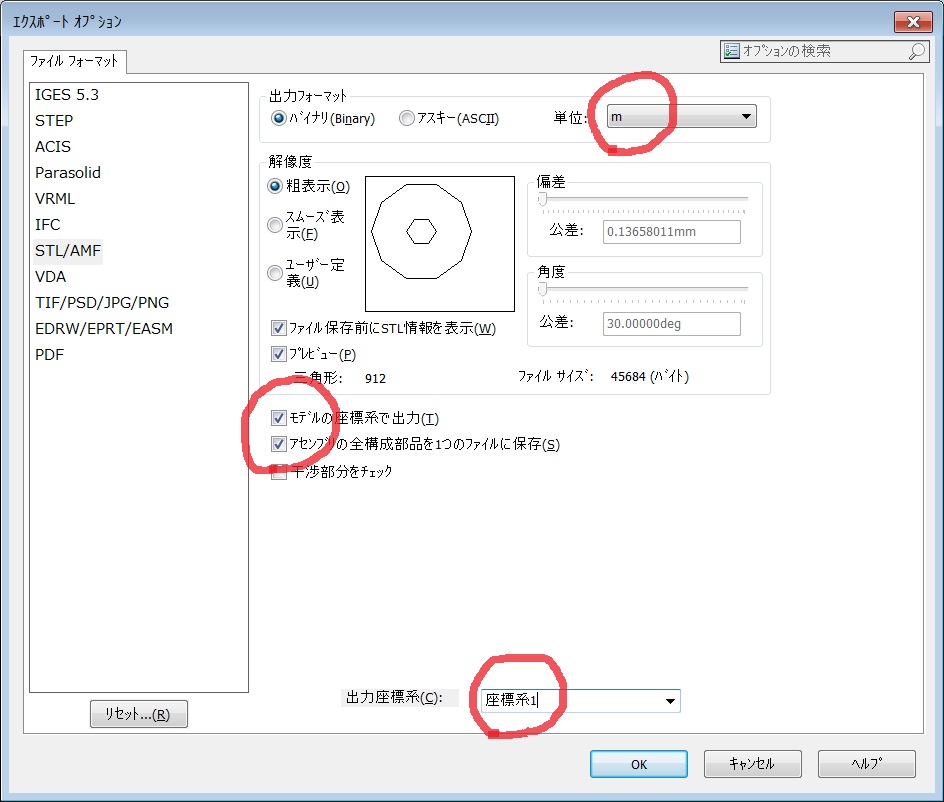
SolidWorksからSTLで出力するときのオプション画面
visual要素には、パーツのSTLファイルを指定します。
シミュレーションにおける衝突検出の計算負荷を減らすために、簡略化したパーツもSolidWorksで作成して、
collision要素には、その簡略化したパーツのSTLファイルを指定しました。
collision要素には、その簡略化したパーツのSTLファイルを指定しました。
inertial要素の、重量や慣性モーメントには、SolidWorksで計算される値を用いました。オプションで単位をメートルにし、座標系を設定します。
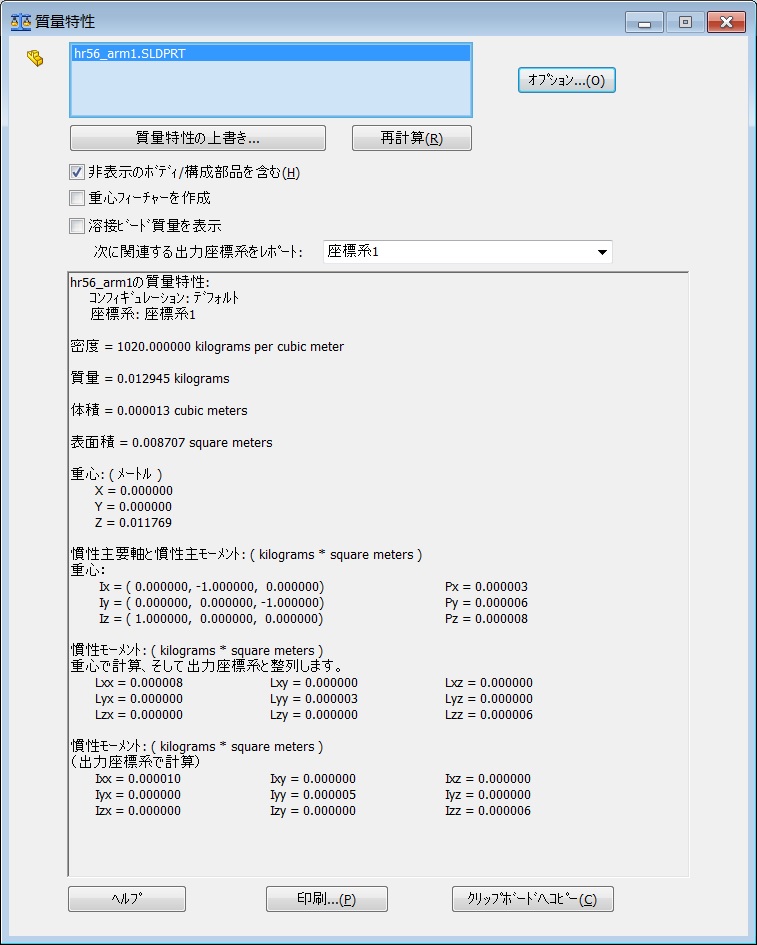
SolidWorksで計算される慣性モーメント
link要素とjoint要素を使用して、SolidWorksで出力したパーツを組み立てていき、ロボットアームのURDFを完成させます。
ロボットアームのURDFファイル hajimearm.urdf
<?xml version="1.0"?>
<robot name="hajimearm">
<link name="world"/>
<link name="base_link">
<visual>
<geometry>
<mesh filename="package://hajimearm_description/meshes/hr56_base.stl" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://hajimearm_description/meshes/hr56_base.stl" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0"/>
</collision>
<inertial>
<mass value="0.164985"/>
<origin xyz="-0.011 0 0.019" rpy="0 0 0"/>
<inertia ixx="0.000126" iyy="0.000176" izz="0.000125" ixy="0" ixz="0" iyz="-4.3e-5"/>
</inertial>
</link>
<joint name="base_link_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 0"/>
<parent link="world"/>
<child link="base_link"/>
</joint>
<link name="arm1_link">
<visual>
<geometry>
<mesh filename="package://hajimearm_description/meshes/hr56_arm1.stl" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://hajimearm_description/meshes/hr56_arm1.stl" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0"/>
</collision>
<inertial>
<mass value="0.012945"/>
<origin xyz="0 0 0.012" rpy="0 0 0"/>
<inertia ixx="1.0e-5" iyy="5.0e-6" izz="6.0e-6" ixy="0" ixz="0" iyz="0"/>
</inertial>
</link>
<joint name="joint_1" type="revolute">
<origin xyz="0 0 0.046" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="arm1_link"/>
<limit effort="5" lower="-2.617" upper="2.617" velocity="1.571" />
</joint>
<link name="arm2_link">
<visual>
<geometry>
<mesh filename="package://hajimearm_description/meshes/hr56_arm2.stl" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://hajimearm_description/meshes/hr56_arm2.stl" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0"/>
</collision>
<inertial>
<mass value="0.143134"/>
<origin xyz="-0.005 0 0.066" rpy="0 0 0"/>
<inertia ixx="1.15e-4" iyy="0.001161" izz="4.9e-5" ixy="0" ixz="-9.2e-5" iyz="0"/>
</inertial>
</link>
<joint name="joint_2" type="revolute">
<origin xyz="0 0 0.03" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<parent link="arm1_link"/>
<child link="arm2_link"/>
<limit effort="5" lower="-1.571" upper="1.571" velocity="1.571" />
</joint>
(省略)
Gazeboシミュレーション用にtransmission要素とros_controlを追加します。hajimearm.urdfの続き
<transmission name="tran1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint_1">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="tran2">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint_2">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor2">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
(省略)
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/</robotNamespace>
<controlPeriod>0.001</controlPeriod>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
<gazebo>
<plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so">
<jointName>joint_1, joint_2, joint_3, joint_4, joint_5, joint_6, joint_7</jointName>
</plugin>
</gazebo>
</robot>
STLファイルの中身にsolidの文字があれば警告が出ます。先頭にあるsolidの文字を、例えばsssssに置換します。
sed -i 's/^solid/sssss/' *
URDFをチェックします。
check_urdf urdf/hajimearm.urdf
ROSを起動しておきます。
roscore cd hajimerobot6_ws source devel/setup.bash
URDFチェックで問題なければrvizで表示して確認します。
cd src/hajimearm_description roslaunch urdf_tutorial display.launch model:=urdf/hajimearm.urdf gui:=true
joint_state_publisherのスライダーを動かすとロボットアームのjointが動きます。
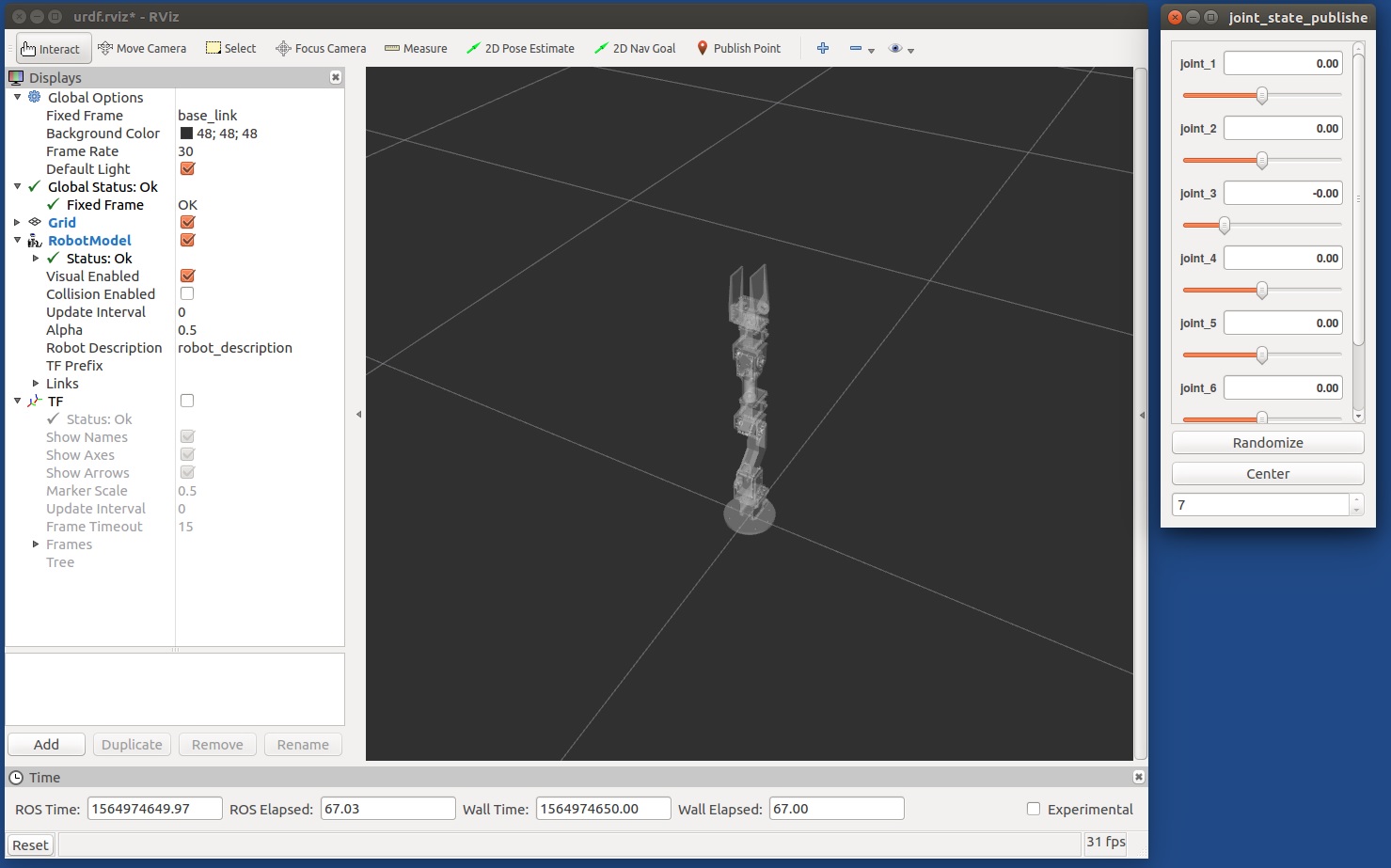
rvizにロボットアーム表示
ROSでロボットアームのシミュレーション
ロボットアームをMoveItで動かすために、以下のMoveItセットアップアシスタントで設定を行います。
roslaunch moveit_setup_assistant setup_assistant.launch
多数のファイルが自動作成されるが、手動で修正しなければならないファイルがあります。
controllers.yaml
# Hand-made
controller_manager_ns: /
controller_list:
- name: arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint_1
- joint_2
- joint_3
- joint_4
- joint_5
- joint_6
- name: hand_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint_7
hajimearm_moveit_controller_manager.launch
<launch>
<param name="moveit_controller_manager"
value="moveit_simple_controller_manager/MoveItSimpleControllerManager"/>
<param name="controller_manager_name" value="/" />
<param name="use_controller_manager" value="true" />
<rosparam file="$(find hajimearm_moveit_config)/config/controllers.yaml"/>
</launch>
次に、シミュレータのGazeboにロボットアームを表示させるために、以下をまとめたファイル(hajimearm.launch)を作成します。
1) gazebo_rosでhajimearm.urdfを生成します。
2) controller_managerでarm_controllerとhand_controllerを生成します。
3) robot_state_publisherでロボットの状態を配信します。
hajimearm.launch
<?xml version="1.0"?>
<launch>
<!-- Load the HajimeArm URDF model into the parameter server -->
<param name="robot_description" textfile="$(find hajimearm_description)/urdf/hajimearm.urdf" />
<!-- Start Gazebo with an empty world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch"/>
<!-- Spawn a HajimeArm in Gazebo, taking the description from the
parameter server -->
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model"
args="-param robot_description -urdf -model hajimearm" output="screen"/>
<rosparam file="$(find hajimearm_description)/config/controllers.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager" type="spawner"
args="arm_controller hand_controller" output="screen"/>
<!-- Convert /joint_states messages published by Gazebo to /tf messages,
e.g., for rviz-->
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" output="screen"/>
</launch>
シミュレーションで動かしてみます。
Gazeboを起動する前に、gazebo用モデルファイルの場所を定義しておく必要があります。シミュレーション用に作成したtableとboxはmodelsの中です。
(指定なしだとgazeboのディレクトリは、~/.gazebo、変更するときはGAZEBO_MODEL_PATHで設定することもできる。)
(参考 http://gazebosim.org/tutorials?tut=ros_roslaunch)
package.xml (hajimearm_gazebo) (一部)
Gazeboを起動する前に、gazebo用モデルファイルの場所を定義しておく必要があります。シミュレーション用に作成したtableとboxはmodelsの中です。
(指定なしだとgazeboのディレクトリは、~/.gazebo、変更するときはGAZEBO_MODEL_PATHで設定することもできる。)
(参考 http://gazebosim.org/tutorials?tut=ros_roslaunch)
package.xml (hajimearm_gazebo) (一部)
<exec_depend>gazebo_ros</exec_depend>
<export>
<gazebo_ros gazebo_model_path="${prefix}/models"/>
<gazebo_ros gazebo_media_path="${prefix}/models"/>
</export>
Gazeboを起動します。
roslaunch hajimearm_description hajimearm.launch

Gazeboでロボットアームをシミュレーション
シミュレーション用に作成したtableとboxありの場合です。
hajimearm_world.world
<?xml version="1.0" ?>
<sdf version="1.4">
<world name="default">
<include>
<uri>model://ground_plane</uri>
</include>
<include>
<uri>model://sun</uri>
</include>
<include>
<uri>model://table1</uri>
<name>table1</name>
<pose>0.2 0 0 0 0 0</pose>
</include>
<include>
<uri>model://box1</uri>
<name>box1</name>
<pose>0.2 0 0.22 0 0 0</pose>
</include>
</world>
</sdf>
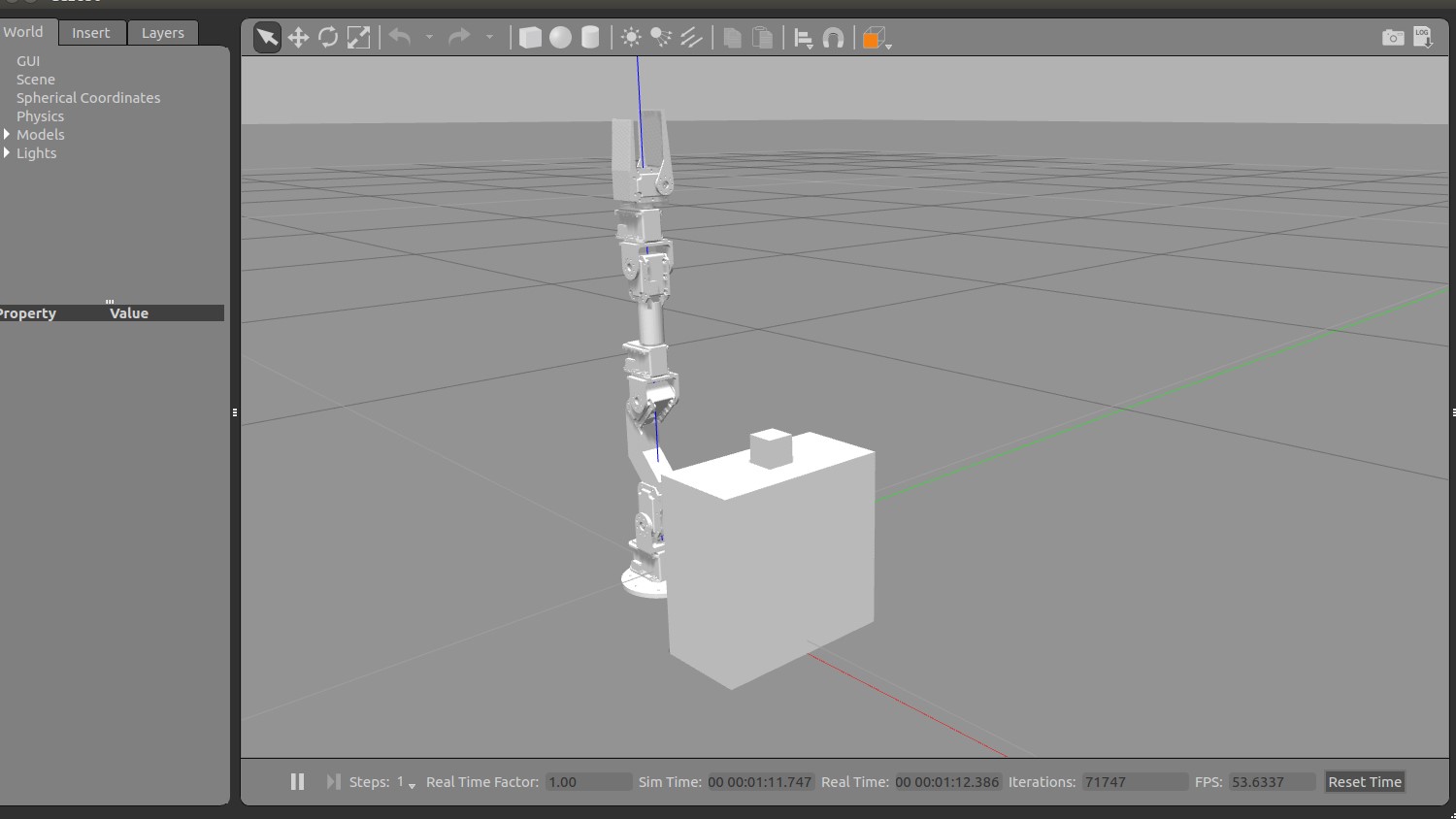
Gazeboでロボットアームをシミュレーション(tableとboxモデルあり)
MoveGroup、rvizを起動します。rviz画面からプランニングにてロボットに指令を出すことができます。
roslaunch hajimearm_moveit_config move_group.launch roslaunch hajimearm_moveit_config moveit_rviz.launch config:=true
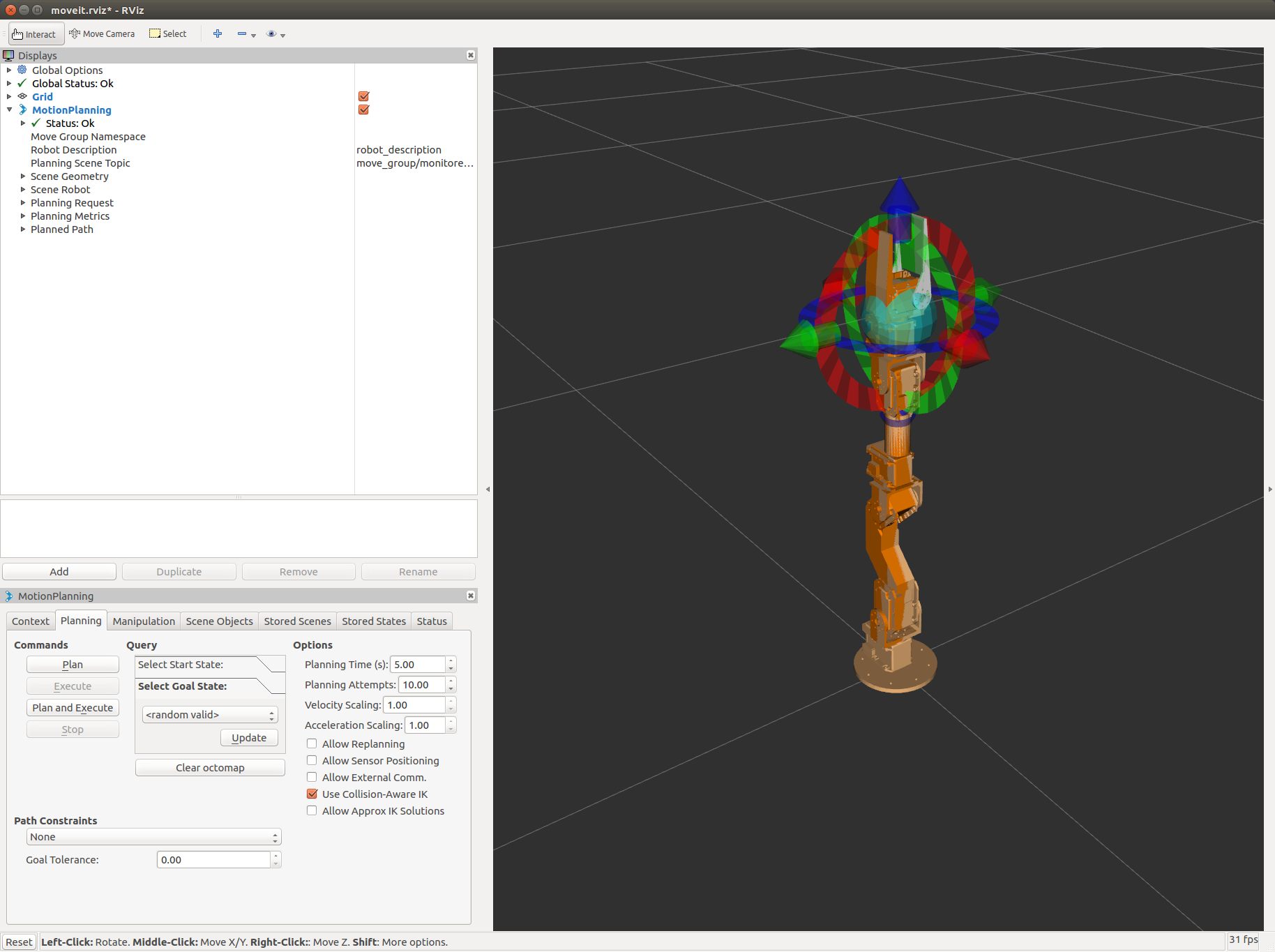
rvizのプランニング
pythonプログラムで動かす場合は、例えば以下のように実行します。
python scripts/move_group.py
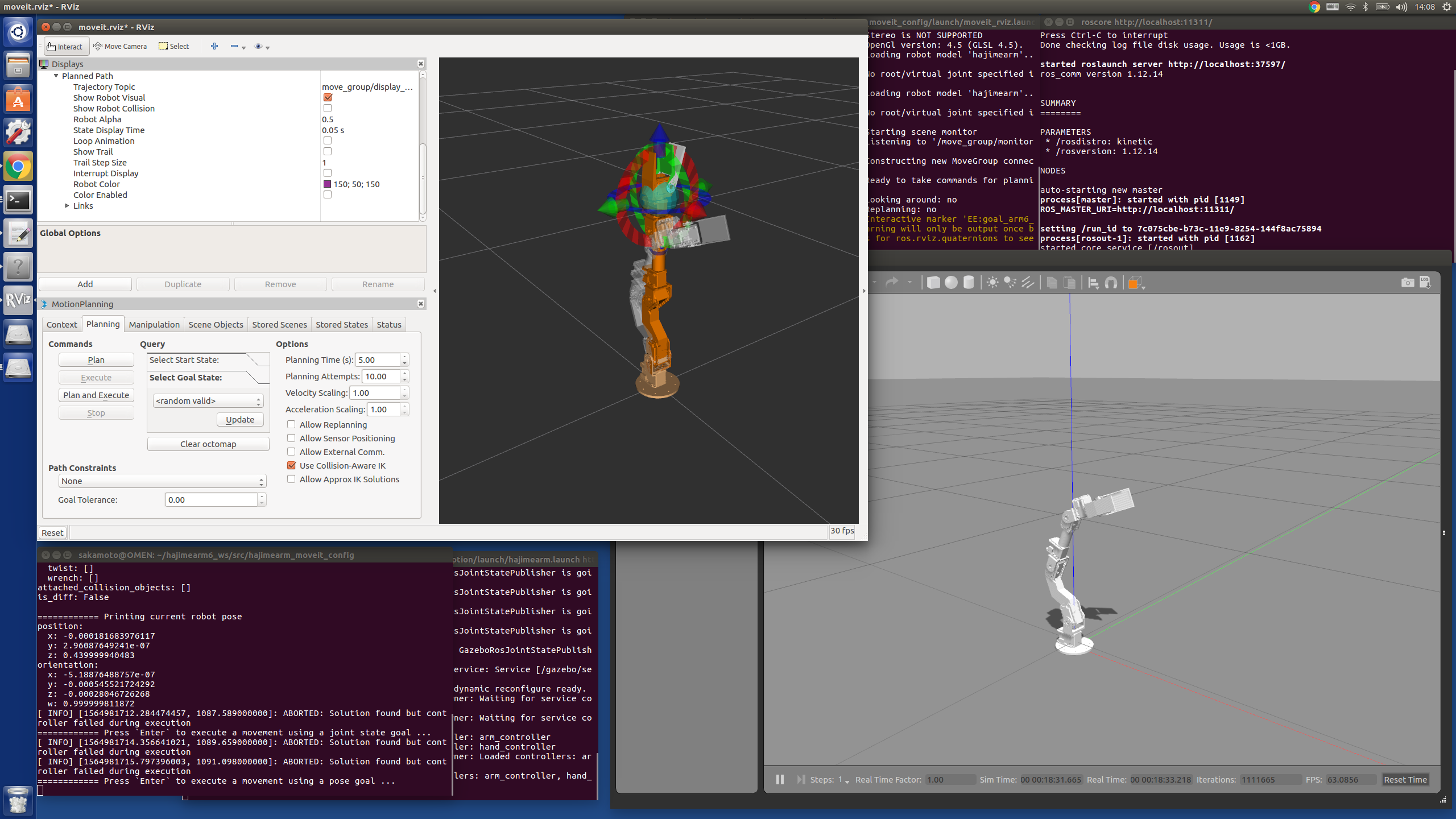
ROSのシミュレーション画面
ROSのノードとトピックを表示します。
rqt_graph
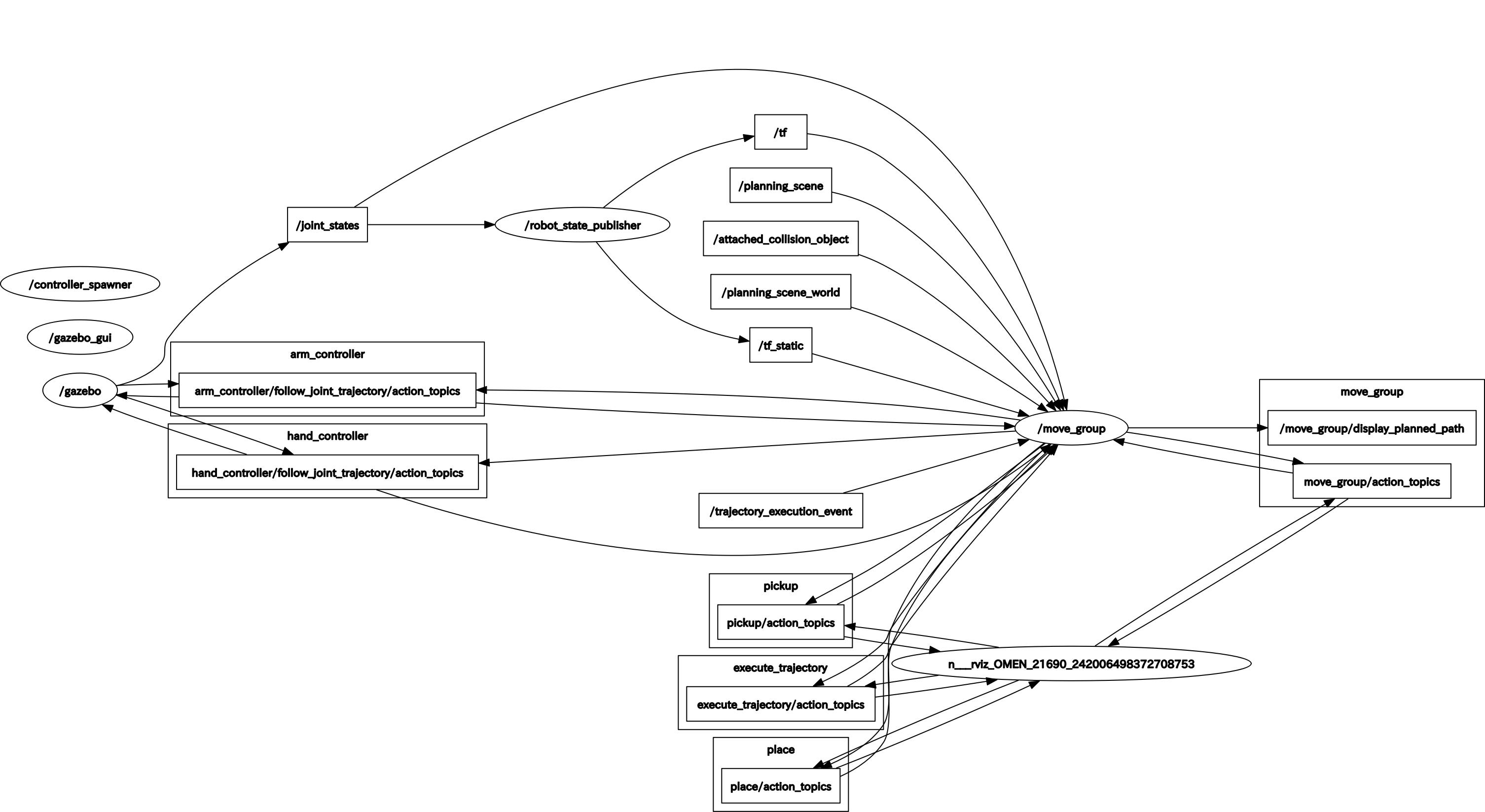
ROSのノードとトピック
ROSの座標変換TFを表示します。
rosrun tf view_frames
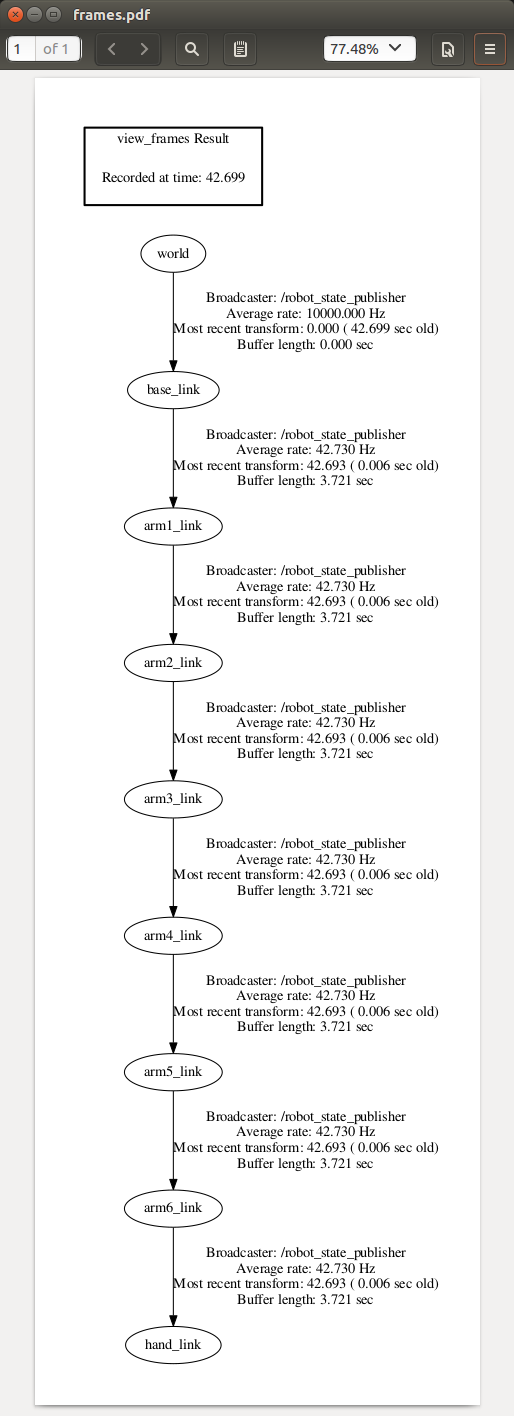
ROSの座標変換TF
ROSからロボットアームの実機を動作
ロボットアームの実機を動作さする場合は、hajimearm.urdfからGazeboに関わる部分を削除したものhajimearm_robothw.urdfを使います。
hajimearm.urdfからtransmission要素とros_controlを削除しました。
roslaunch hajimearm_description hajimearm_robothw.launch
PCとサーボモータとの接続は、USB-RS485変換器を使用します。
ROBOTIS社ダイナミクセルのサーボモータを動かすためのドライバを起動します。
roslaunch hajimearm_driver hajimearm_controller.launch roslaunch hajimearm_ros_control hajimearm_ros_control.launch
MoveGroup、rvizを起動する。rviz画面からロボットに指令を出すことができます。rvizのプランニングで実機が動かせます。
roslaunch hajimearm_moveit_config move_group.launch roslaunch hajimearm_moveit_config moveit_rviz.launch config:=true
pythonプログラムで動かす場合は、例えば以下を実行します。
cd src/hajimearm_moveit_config python scripts/move_group.py
実機の動きに合わせて、rviz上のロボットアームも動きます。
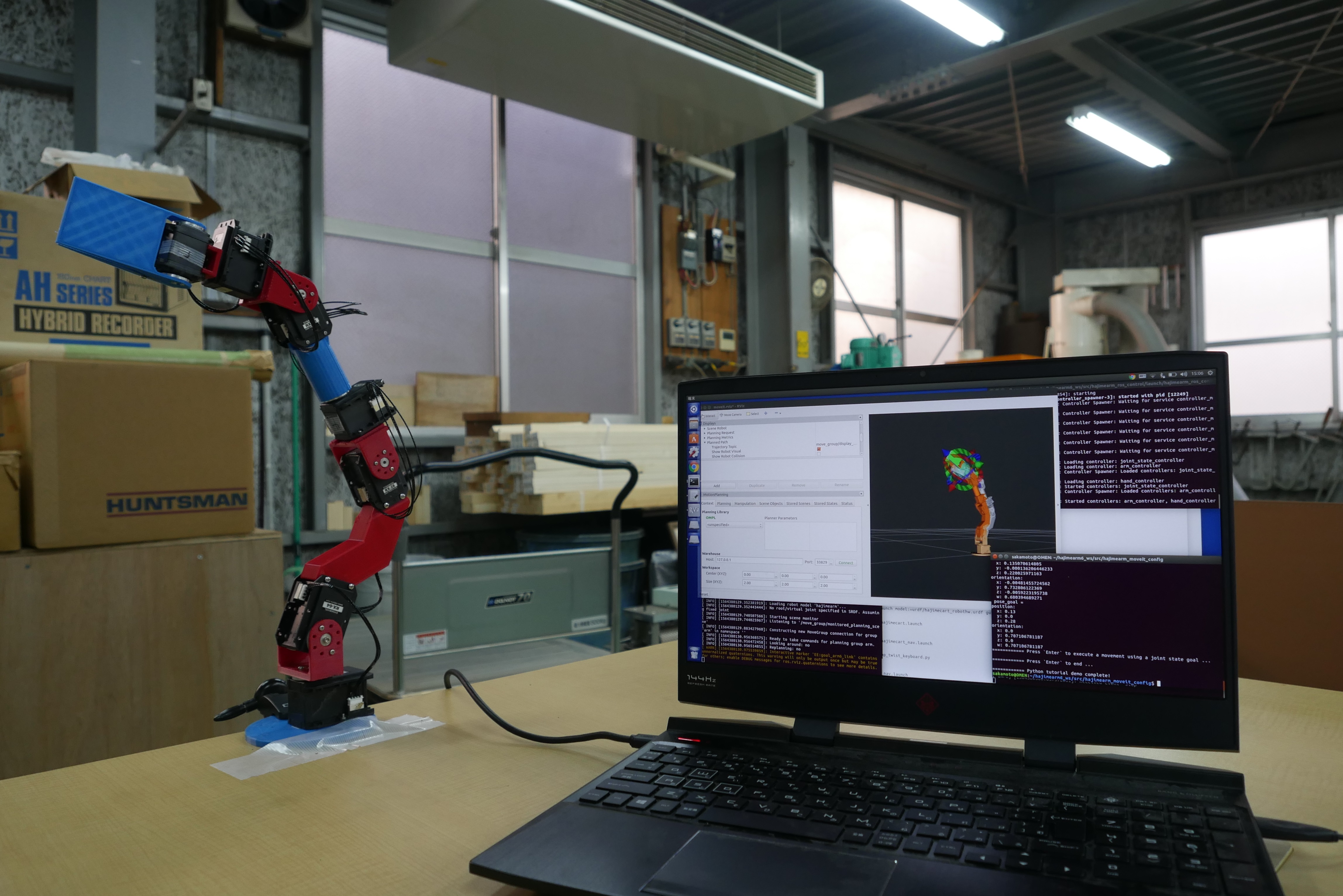
ROSからロボットアームの実機を動かす
ROSのノードとトピックを表示します。
rqt_graph
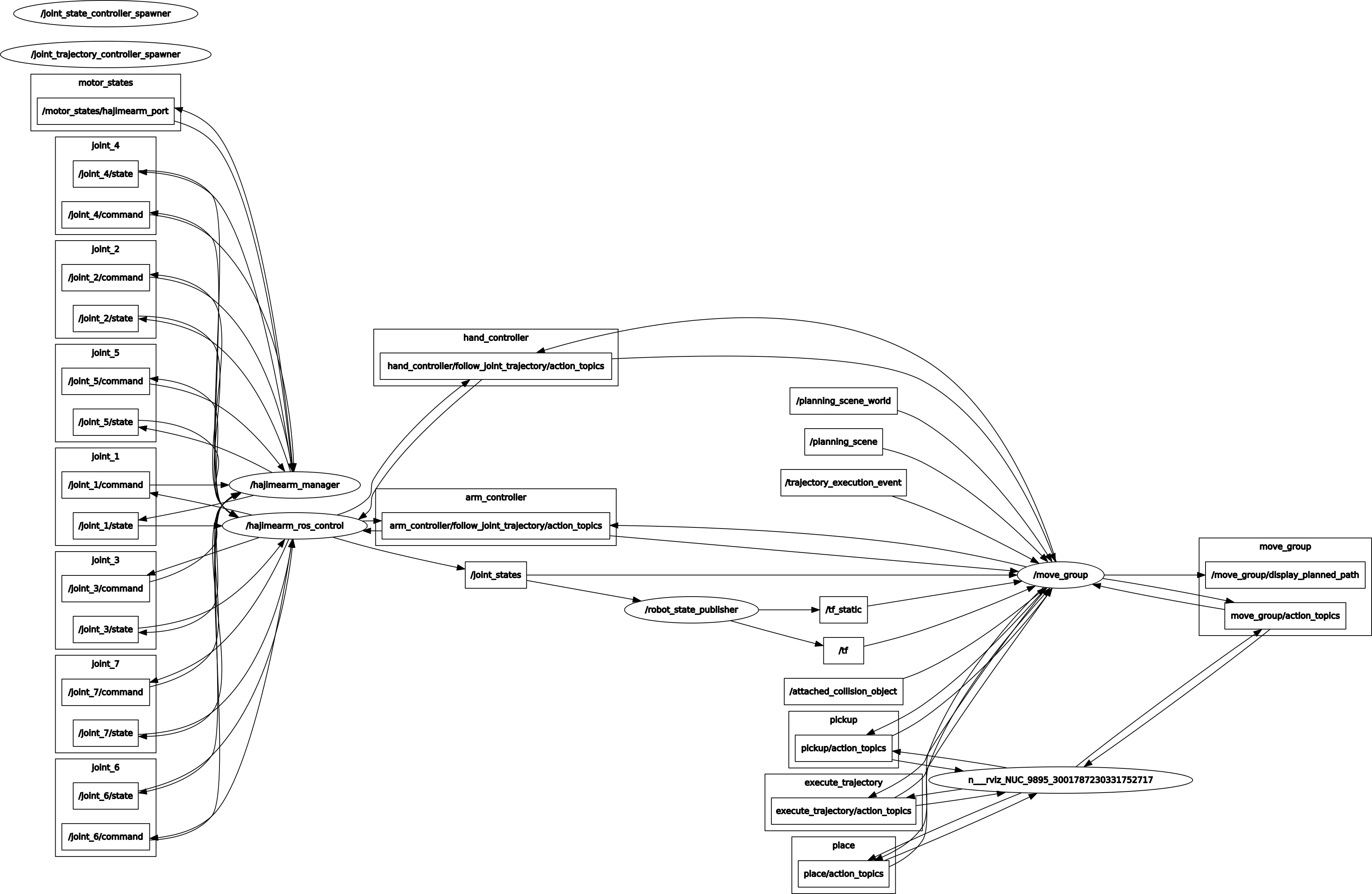
ROSのノードとトピック
ROSの座標変換TFを表示します。
rosrun tf view_frames
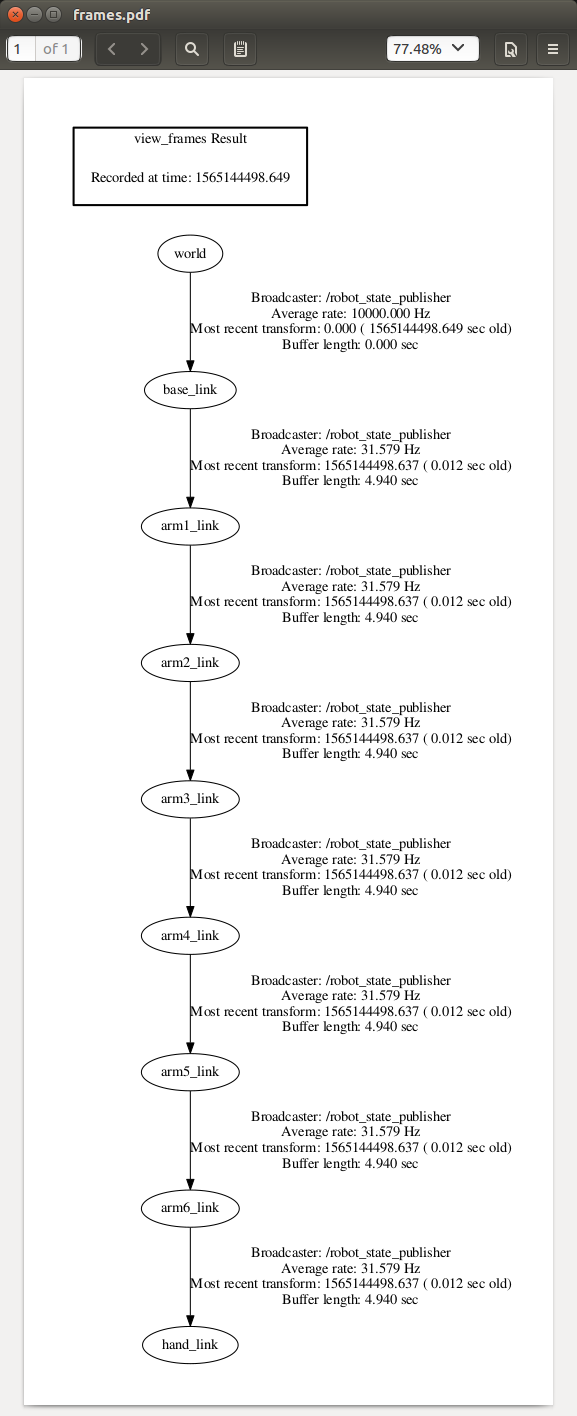
ROSの座標変換TF
逆運動学計算IKFast
以下は参考情報です。
MoveItでロボットアーム等の逆運動学計算を行う際に、デフォルトのKDL(Kinematics Dynamics Library)を、より高速のIKFastに置き換えます。OpenRAVEを使用します。
rosrun collada_urdf urdf_to_collada hajimearm.urdf hajimearm.dae openrave-robot.py hajimearm.dae --info links openrave hajimearm.dae
OpenRAVEで表示したロボットアーム
export BASE_LINK="0" export EEF_LINK="7" export IKFAST_OUTPUT_PATH=`pwd`/ikfast61_arm.cpp python `openrave-config --python-dir`/openravepy/_openravepy_/ikfast.py --robot=hajimearm.dae --iktype=transform6d --baselink="$BASE_LINK" --eelink="$EEF_LINK" --savefile="$IKFAST_OUTPUT_PATH"
catkin_create_pkg hajimearm_ikfast_arm_plugin catkin_make
rosrun moveit_kinematics create_ikfast_moveit_plugin.py hajimearm "arm" hajimearm_ikfast_arm_plugin "$IKFAST_OUTPUT_PATH"
hajimearm_moveit_config config/kinematics.yamlが以下のように自動修正されました。
kinematics.yaml修正後
kinematics.yaml修正後
arm: kinematics_solver: hajimearm_arm_kinematics/IKFastKinematicsPlugin kinematics_solver_attempts: 3 kinematics_solver_search_resolution: 0.005 kinematics_solver_timeout: 0.005
kinematics.yaml修正前
arm: kinematics_solver: kdl_kinematics_plugin/KDLKinematicsPlugin kinematics_solver_search_resolution: 0.005 kinematics_solver_timeout: 0.005 kinematics_solver_attempts: 3