メカナムホイール(mecanum wheel)
メカナムホイールの車輪を使うと、ロボット(台車)は、全方向に移動できます。真横にも移動できるのが特長です。
メカナムホイールとは、ホイールの外周に45度傾けて小さなローラーがたくさんついた車輪です。ローラーの向きに注意して、この車輪を台車に4個取り付けて、それぞれの車輪をモータで駆動します。小さなローラーは、自由に回転できます、フリーです。
4個の車輪の回転方向を変えることで、台車は全方向に移動できます。

メカナムホイール
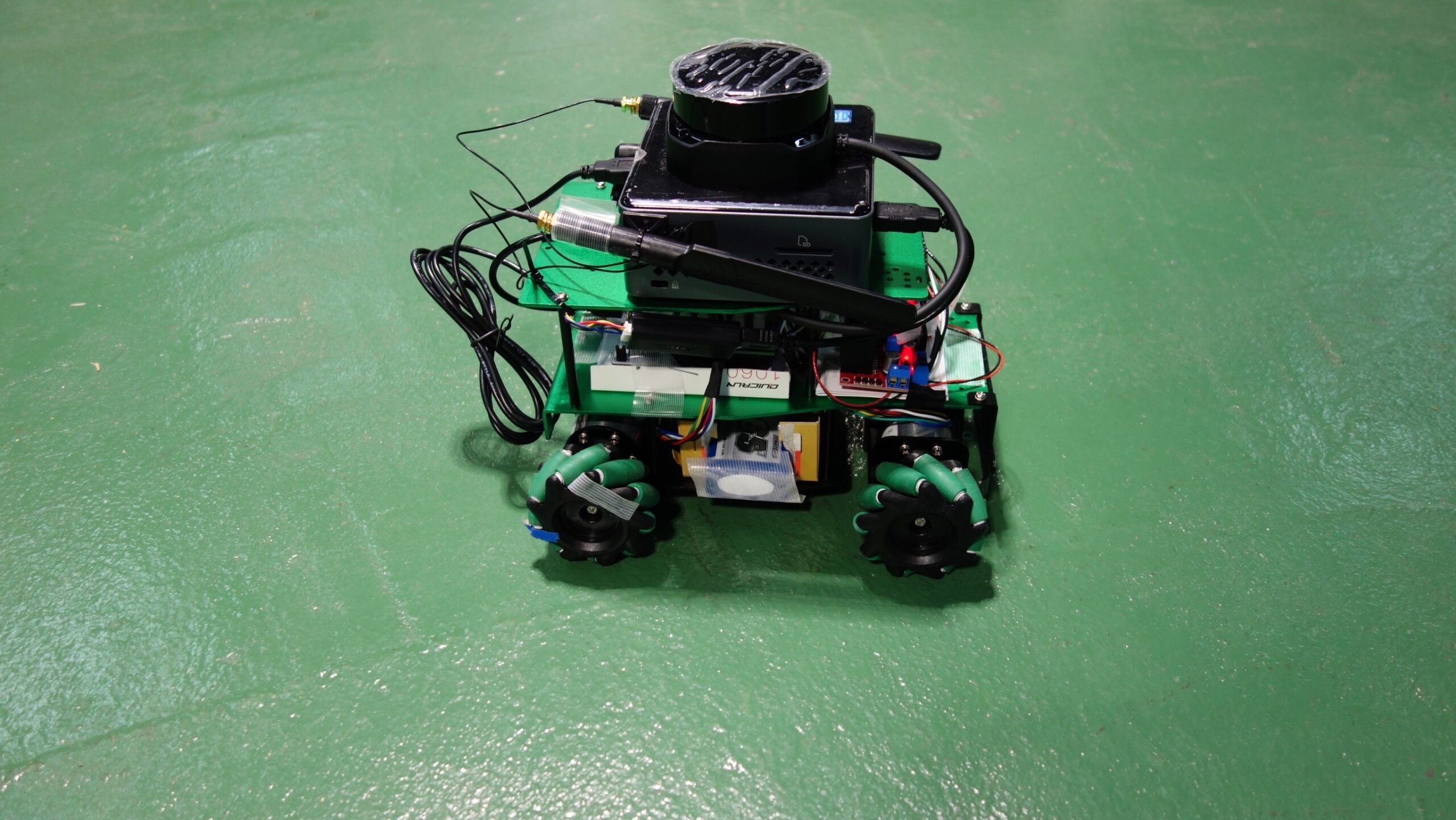
メカナムホイールロボットの外観
台車は、市販のメカナムホイールの台車(Yahboom社)を購入して組み立てました。4個のメカナムホイールにそれぞれモータがついています。 電気系、ソフト系を制作しました。 LiDARのセンサ(RPLIDAR S2)で全周360度の障害物をスキャンしています。モータ制御は、STマイクロ社のマイコンで、エンコーダ付のDCモータを速度制御しています。モータ駆動用アンプは、市販品(L298n)です。小型PCのIntel NUCでナビゲーション制御をしています。OSはubuntuで、ROS2(ロボットオペレーティングシステム2) Humbleを使用しています。バッテリーはLiPoの4セルです。
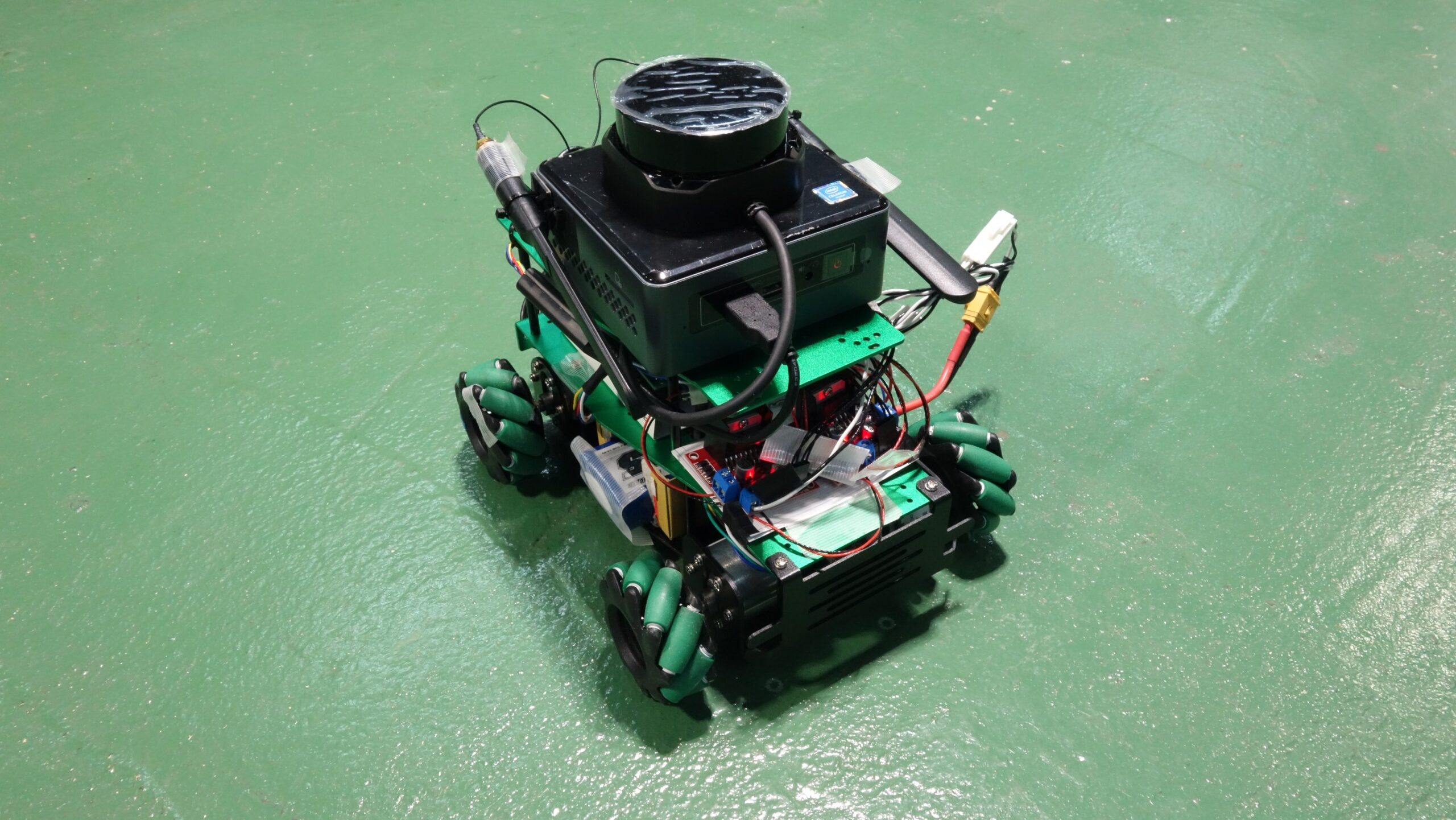
メカナムホイールロボットの外観
-

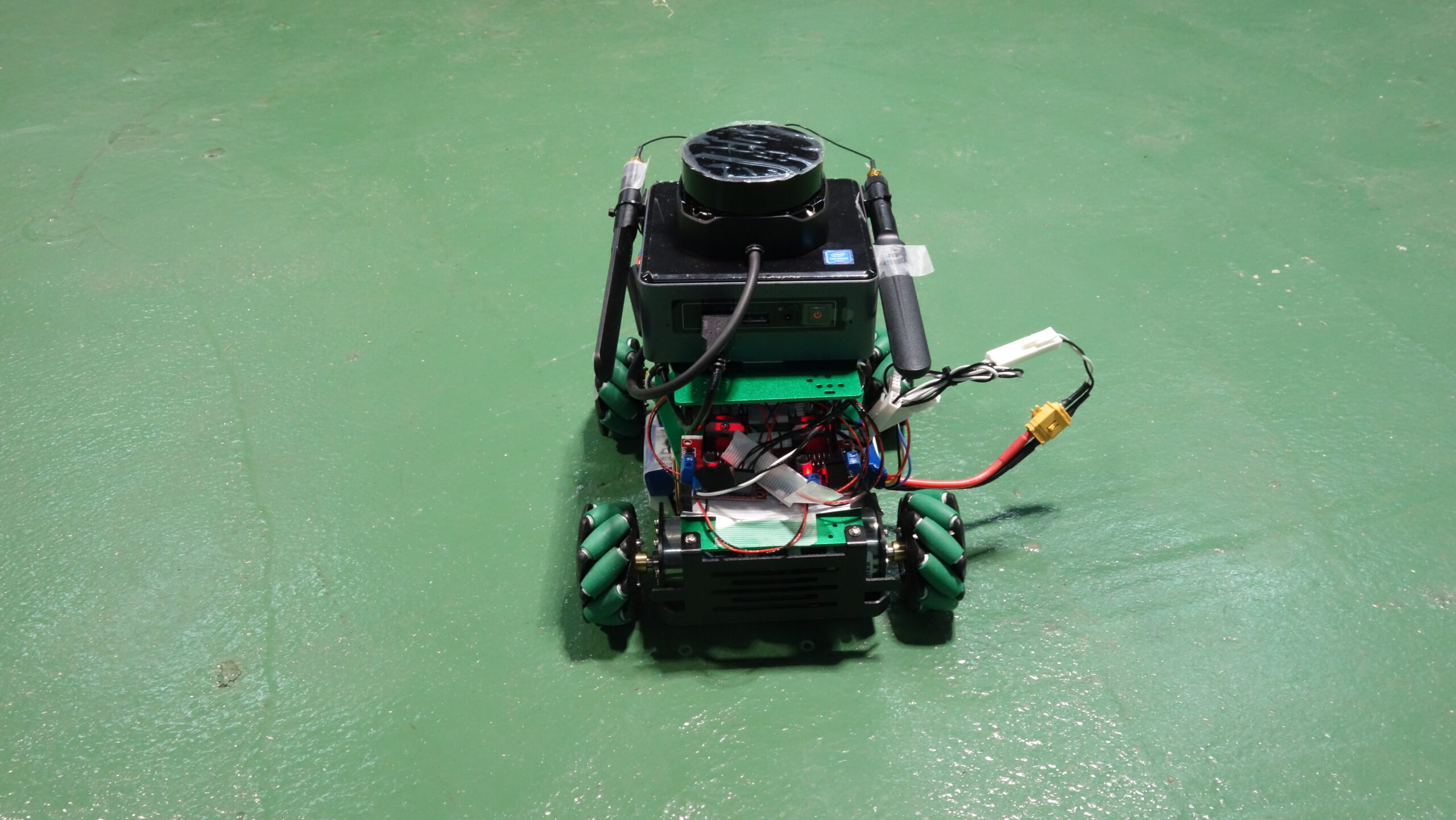
- 前方
-

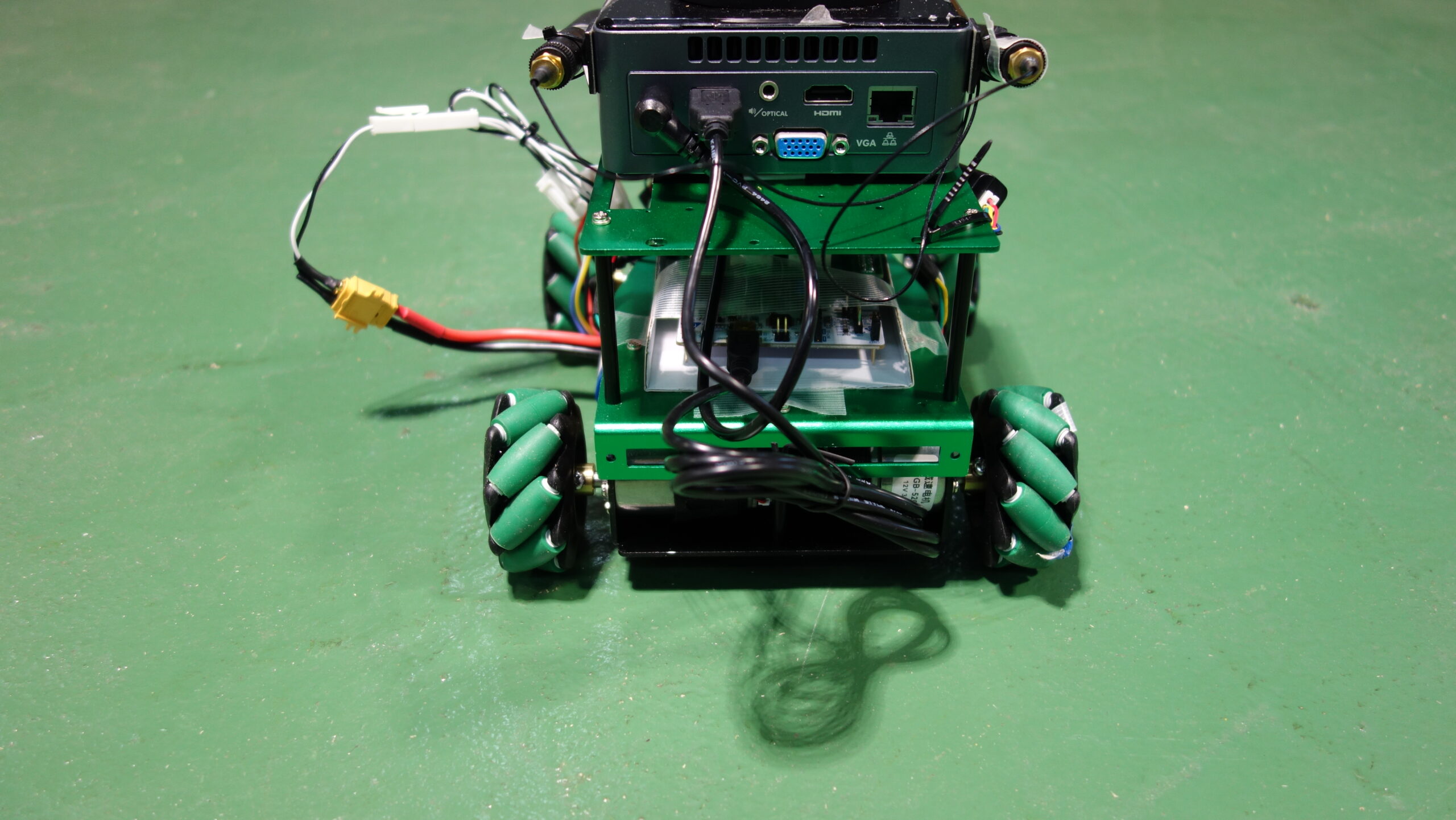
- 後方
-

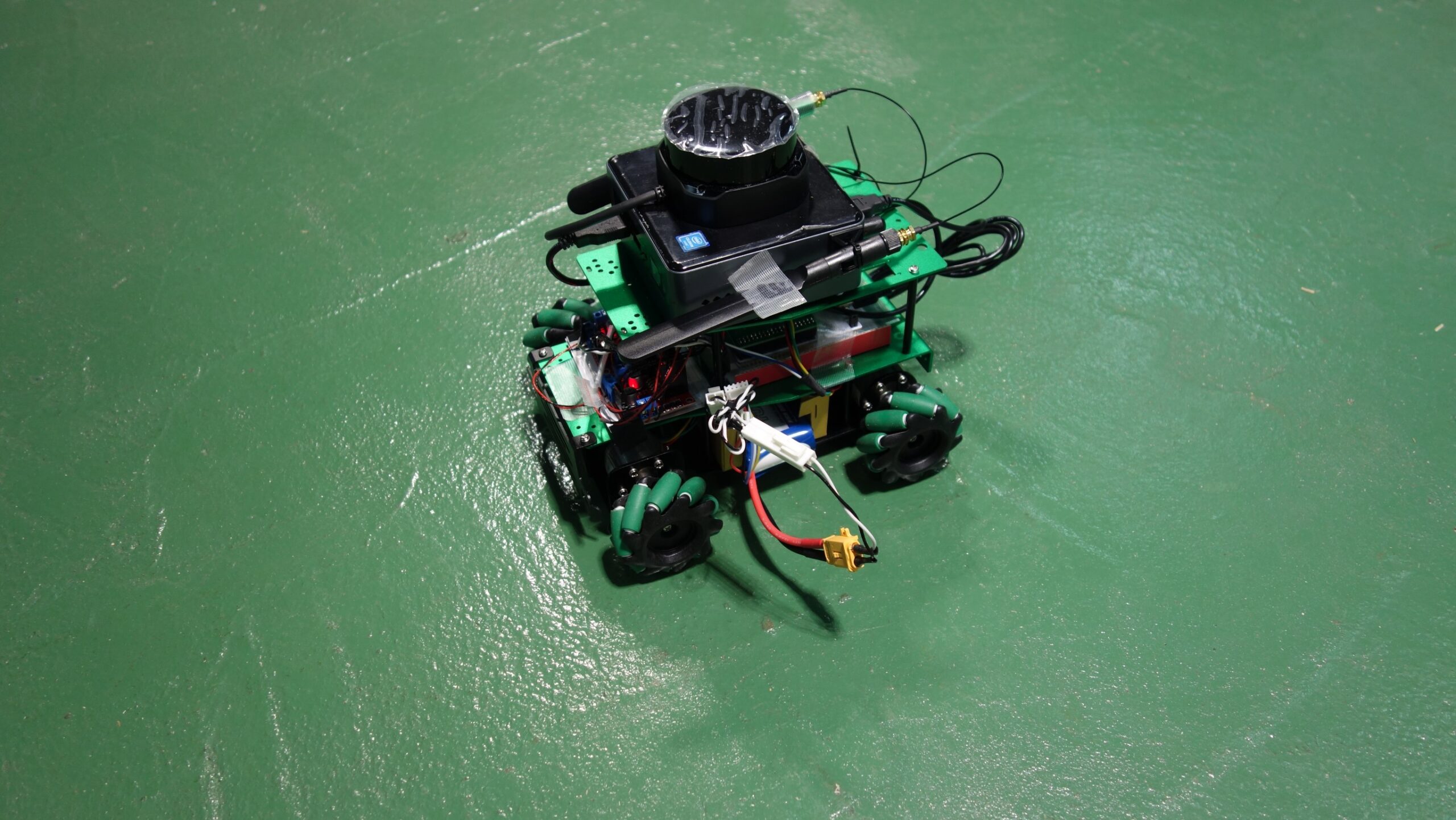
- 左側面
-

- 右側面
メカナムホイールロボットの全方向移動
この動画では、台車は、前進、後退、左横、右横、左斜め前、右斜め後ろ、右斜め前、左斜め後ろ、その場で左回転、その場で右回転の順に移動しています。
表.ロボットの移動方向と車輪の回転方向の関係(+が前転、-が後転、0が停止)
| 前進 | 左前+、右前+、左後+、右後+ |
| 後退 | 左前-、右前-、左後-、右後- |
| 左横 | 左前-、右前+、左後+、右後- |
| 右横 | 左前+、右前-、左後-、右後+ |
| 左斜め前 | 左前0、右前+、左後+、右後0 |
| 右斜め後 | 左前0、右前-、左後-、右後0 |
| 右斜め前 | 左前+、右前0、左後0、右後+ |
| 左斜め後 | 左前-、右前0、左後0、右後- |
| その場で左回転 | 左前-、右前+、左後-、右後+ |
| その場で右回転 | 左前+、右前-、左後+、右後- |
メカナムホイールロボットのナビゲーション
PC画面上で、目標の位置と向きを設定すると、移動ロボットは移動を始め、目標に到着すると停止します。
あらかじめ作成しておいた地図と、LiDARのセンサー情報を用いて、移動ロボットは、自己位置を推定しています。移動する経路は、衝突しないように最短で計画されます。また、移動途中に新たな障害物が現れても、衝突を回避するように経路を修正して進みます。
全方向に移動するので、横移動や斜め移動などのおもしろい動きをしています。
参考
amazonの商品ページへのリンク
Yahboom リモートコントロールロボット フレームシャーシー マクナム アルミシャーシー Arduino対応 ラズベリーパイ Jetson Nano 学習組立キット 教育 STEM DIY(マクナムホイールシャーシM)