ROS2(ロボットオペレーティングシステム)
1.自律移動ロボット AMR(Autonomous Mobile Robot)
ROS2を使った自律移動ロボット AMR(Autonomous Mobile Robot)の製作例です。

はじめカート
1)ROS2(ロボットオペレーティングシステム)のインストール
ROS2 Humble をインストールします。
2)自律移動ロボット(AMR)のモデリング
3次元CADのSOLIDWORKSを使って自律移動ロボットを設計します。
3Dデータを使用して、ROSで表示するためにモデリングします。
ROSの表示ツールRViz2で自律移動ロボットを表示して確かめます。
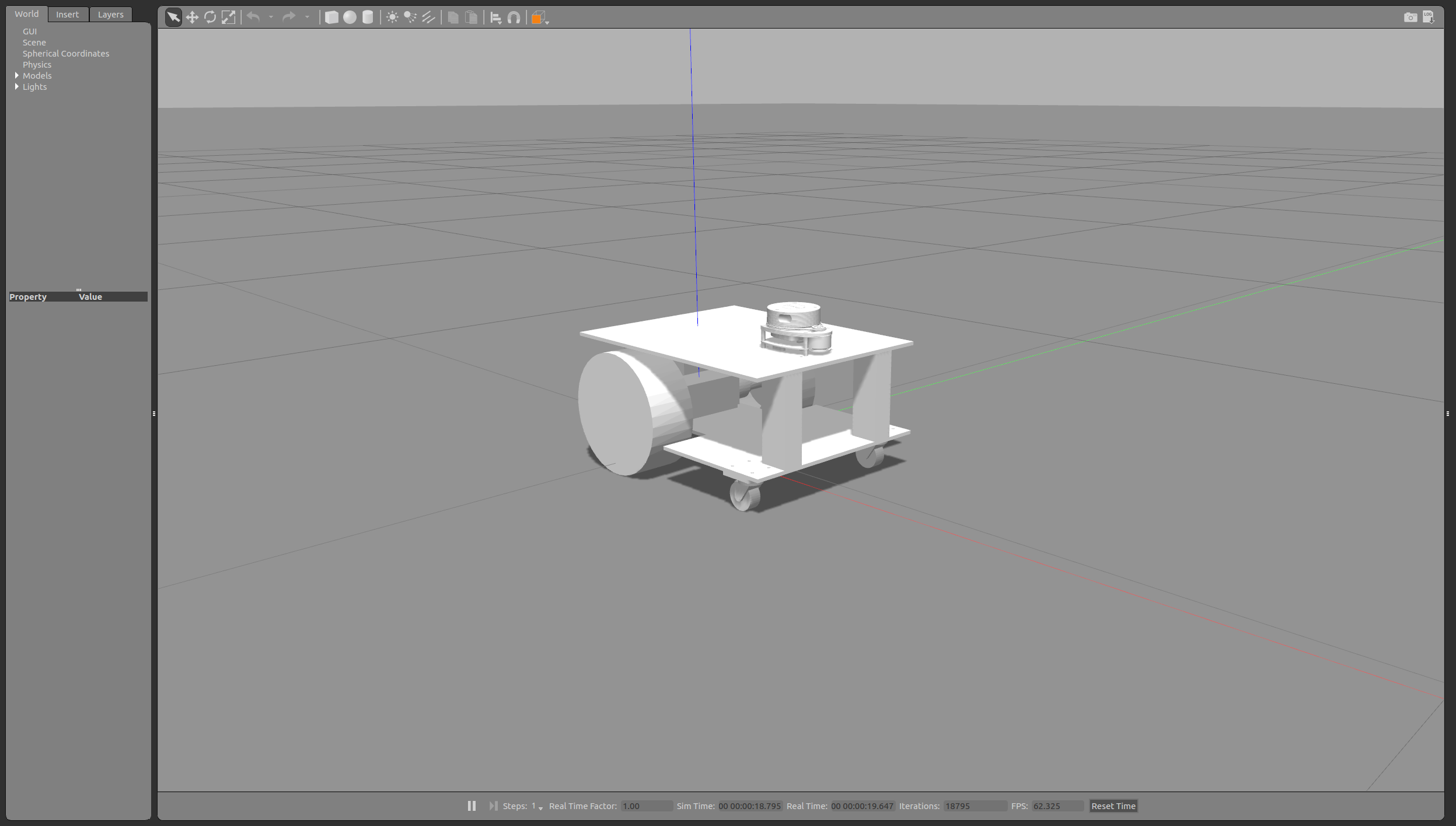
シミュレータGazebo上でシミュレーションするために、Gazeboのプラグインを追加します。
シミュレータ上で自律移動ロボットの動作を確かめます。
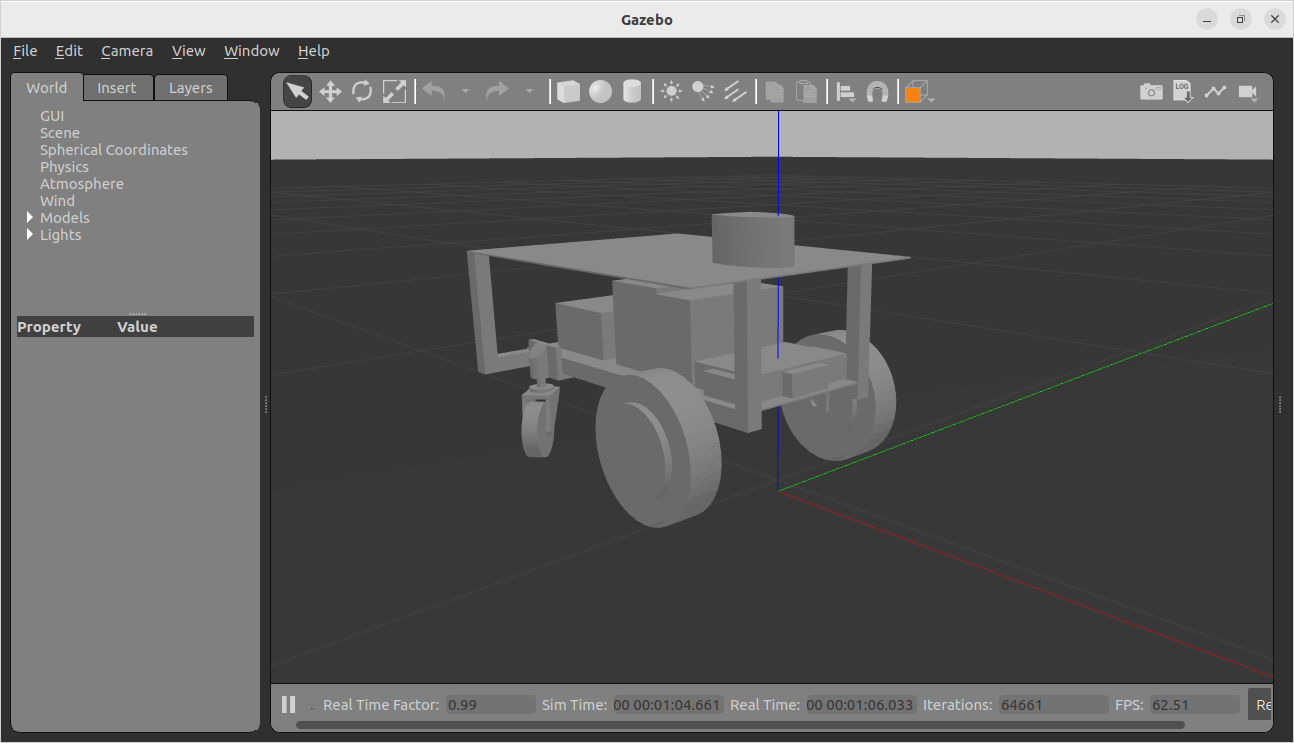
シミュレータ(Gazebo)でAMRの表示
3)自律移動ロボット実機(現実のロボット)の製作と起動
自律移動ロボットの実機を起動します。
>>自律移動ロボット実機(現実のロボット)の製作と起動はこちら
4)シミュレーションによる自律移動ロボットのマッピングとナビゲーション
マッピングでは、自律移動ロボットを動かして、地図を作成します。
ナビゲーションでは、自律移動ロボットが、作成した地図に基づき、自己位置を認識し、目標位置への経路を計画し移動します。
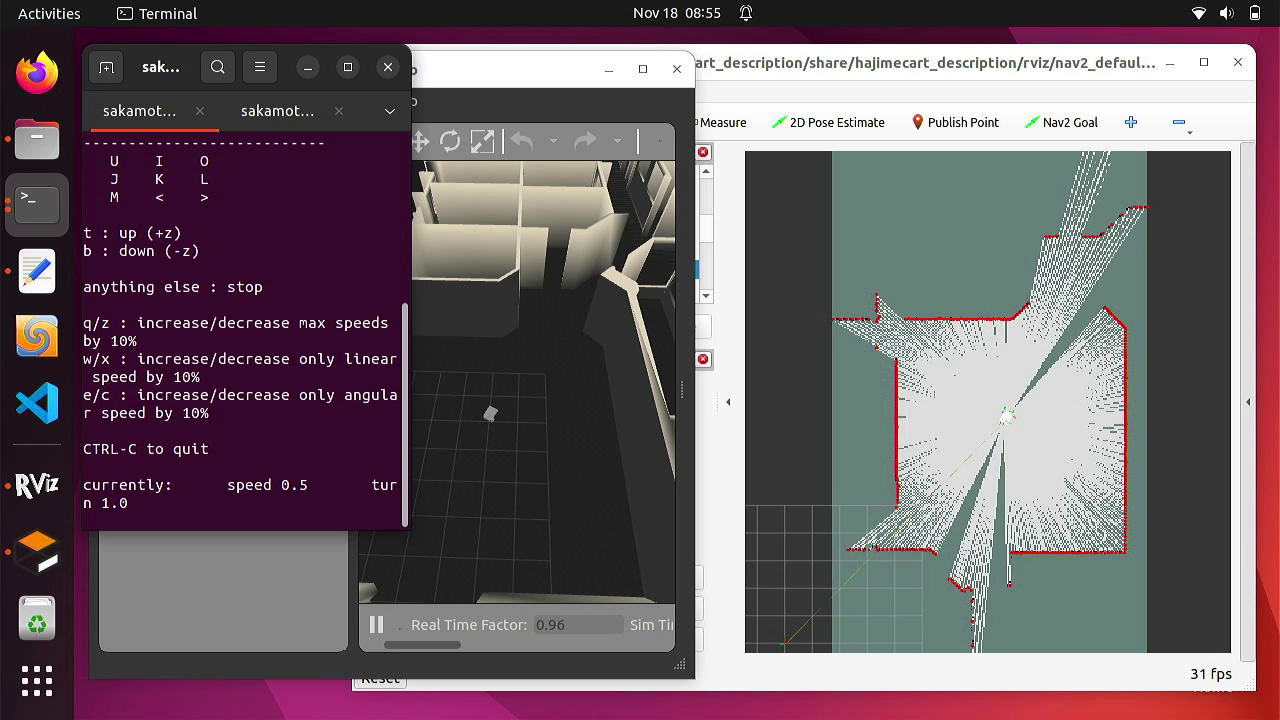
シミュレーションによる自律移動ロボットの地図作成の様子
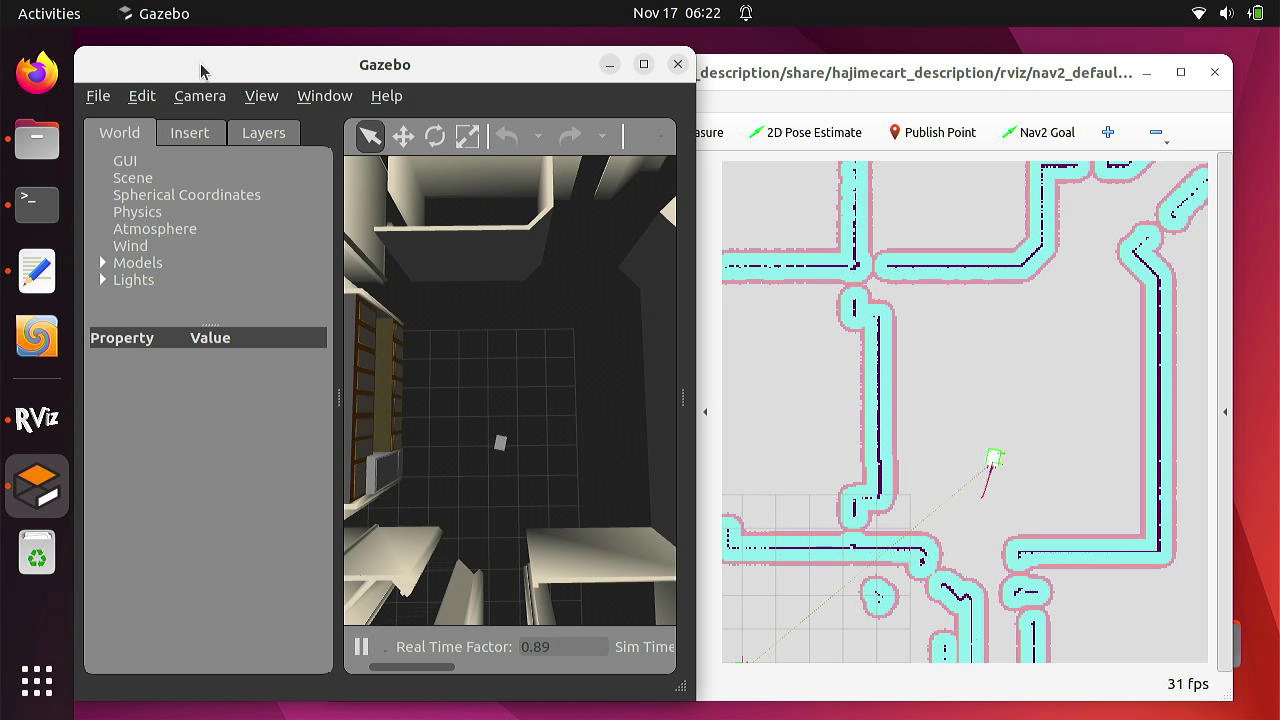
シミュレーションによる自律移動ロボットのナビゲーションの様子
>>シミュレーションによる自律移動ロボットのマッピングとナビゲーションはこちら
5)自律移動ロボットの実機でマッピングとナビゲーション
マッピングでは、自律移動ロボットの実機を動かして、実在する部屋の地図を作成します。
ナビゲーションでは、自律移動ロボットの実機が、作成した地図に基づき、自己位置を認識し、目標位置への経路を計画し移動します。
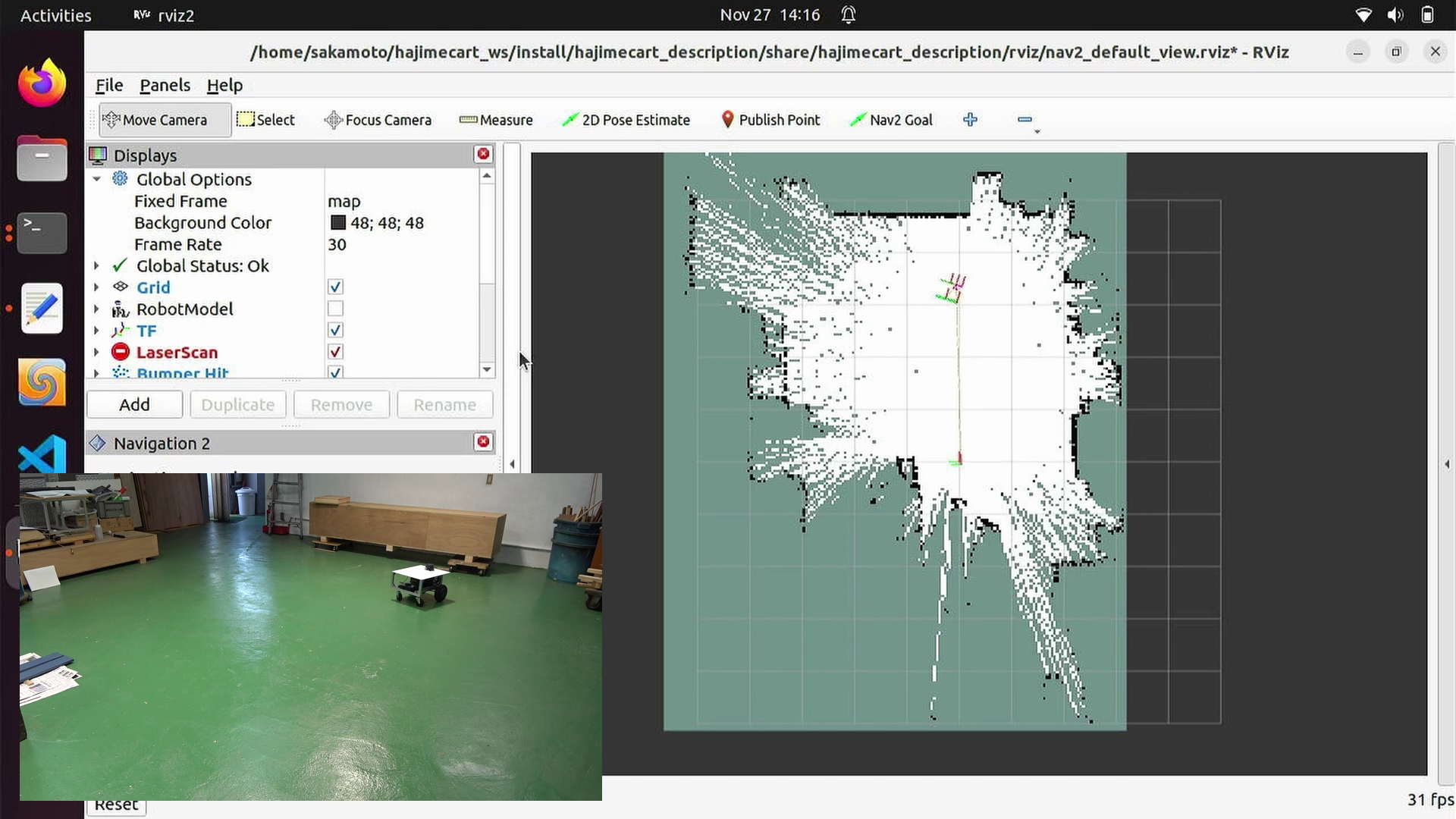
自律移動ロボットの地図作成の様子
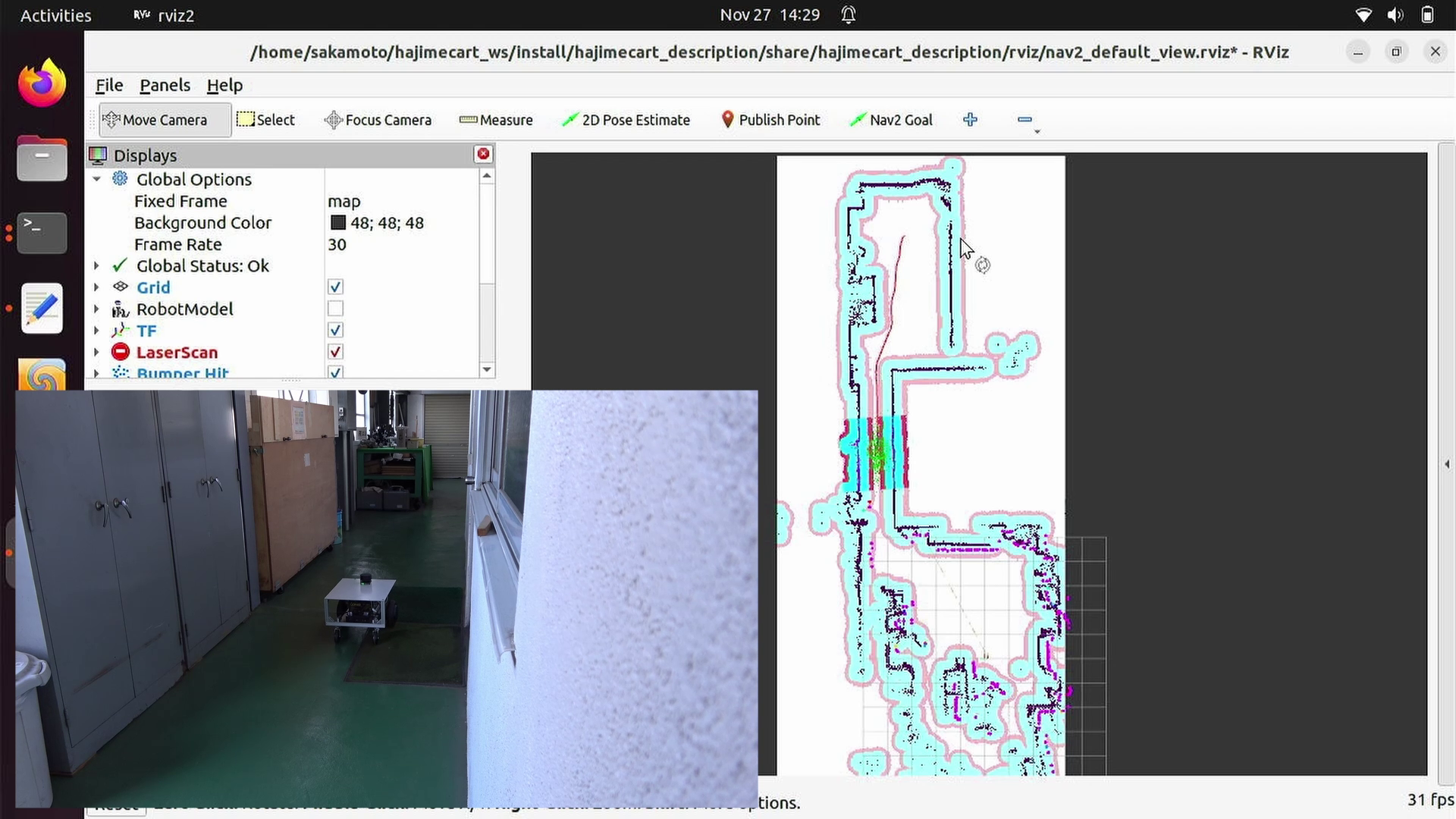
自律移動ロボットのナビゲーションによる移動の様子
>>自律移動ロボットの実機でマッピングとナビゲーションはこちら
ROS(ロボットオペレーティングシステム)
「ROS (Robot Operating System)はソフトウェア開発者のロボット・アプリケーション作成を支援するライブラリとツールを提供しています.ROS (Robot Operating System)はソフトウェア開発者のロボット・アプリケーション作成を支援するライブラリとツールを提供しています. 具体的には, ハードウェア抽象化, デバイスドライバ,ライブラリ,視覚化ツール, メッセージ通信,パッケージ管理などが提供されています. ROSはオープンソースの一つ, BSDライセンスにより, ライセンス化されています.」(http://wiki.ros.org/jaより引用)
http://www.ros.org/
0.ROSのインストール
1.ロボットアーム
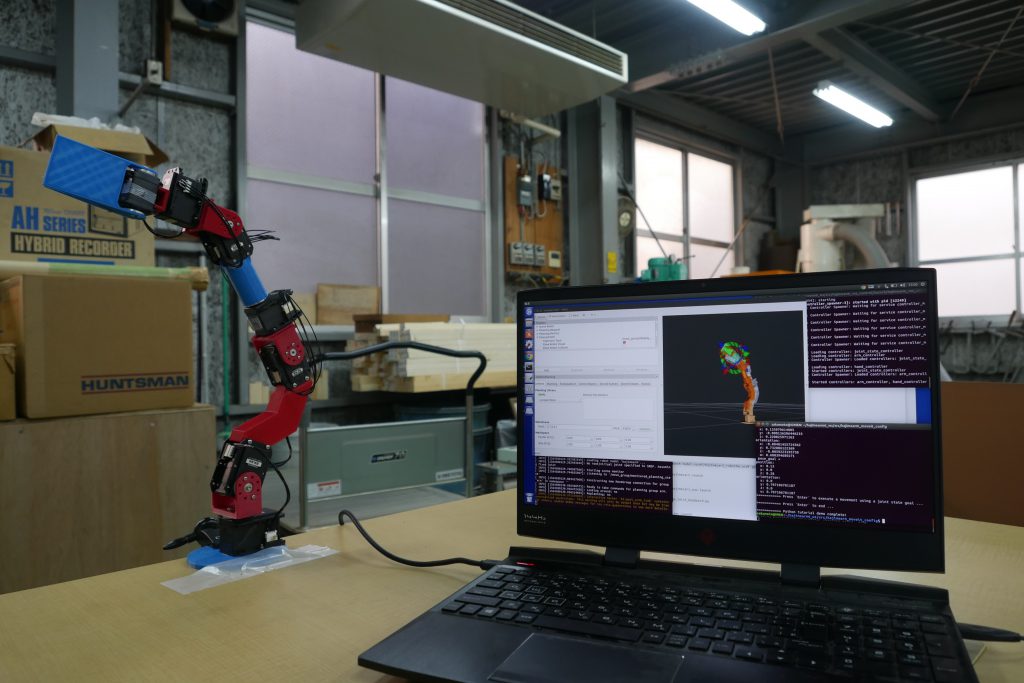
ロボットアーム
1)オリジナルの6軸ロボットアームを3D CADで設計します。
2)ROSの環境でロボットアームを表示したりシミュレーションしたりします。
3)ROSからロボットアームの実機を動かします。
2.ロボットカート
ロボットカートをGAZEBOで表示
オジリナルのロボットカート(ロボット台車)を設計・製作し、それをROSで動かします。
2)ROSの環境でロボットカートを表示したりシミュレーションしたりします。
3)ROSからロボットカートの実機を動かします。
3.ロボットカートのナビゲーション

ロボットカートをナビゲーションで動かす
2)地図上で目標位置・向きを指定して、そこまでロボットカートを自動運転させます。経路上に障害物があっても、それを避けてロボットカートが移動します。