Toggle navigation
トップページ
当社の強み
ヒューマノイド
巨大ヒューマノイド
小型ヒューマノイド
中型ヒューマノイド
大型ヒューマノイド
車輪型ヒューマノイド
四足歩行ロボット
ROS(ロボットOS)
自律移動ロボット AMR (ROS2)
ROS2のインストール (ROS2)
自律移動ロボット(AMR)のモデリング (ROS2)
自律移動ロボット(AMR)実機の製作と起動 (ROS2)
シミュレーションによる自律移動ロボットのマッピングとナビゲーション (ROS2)
自律移動ロボット実機のマッピングとナビゲーション (ROS2)
メカナムホイールの自律移動ロボット
ROSのインストール (ROS)
ROSによるロボットアームの制御 (ROS)
ROSによるロボットカートの制御 (ROS)
ロボットカートのナビゲーション (ROS)
ROSを複数のPCで動作 (ROS)
人工知能(AI)
物体検出に独自データを学習させる(顔ロボット)
リアルタイム物体検出:ロボットの顔が人の方を向く
ラジコンカーの自動運転(ドンキーカー)
AIカーJetBotによる衝突回避と物体追従
ディープラーニングによる画像分類(VGG16の転移学習)
ディープラーニング(CNN)による画像分類
畳み込みニューラルネットワーク(CNN)の中間層の出力を可視化
畳み込みニューラルネットワーク(CNN)のフィルタの可視化
畳み込みニューラルネットワーク(CNN)のヒートマップ
無人運転
GPSを使用したローバーの無人運転
IoT
姿勢制御
ジャイロバイク、ジャイロモノレール、二輪車
リアクションホイール
モータ制御
オンライン講座
【最短で学ぶ】配線なしで始めるアルディーノと電子工作入門
【Pythonではじめる】ラズベリーパイと電子工作入門
アルディーノマイコンと電子工作入門
マイコンとレゴを使ったロボットカーの開発
実演・講演
実績
マスコミの実績
ロボットコンテストの実績
ロボットの実演・講演の実績
論文・学会発表の実績
会社案内
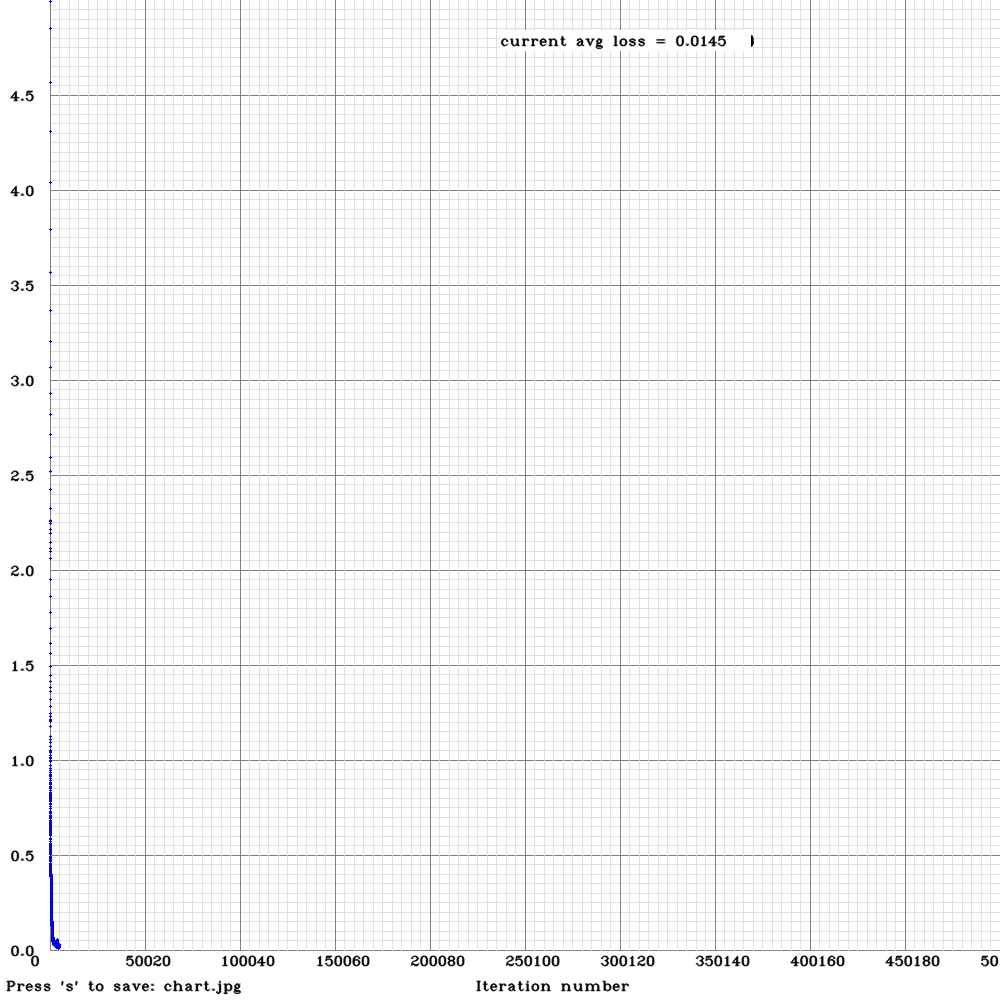
学習中の平均損失のグラフ
HOME
人工知能(AI)
物体検出に独自データを学習させる(顔ロボット)
学習中の平均損失のグラフ