We developed small motor control boards to control servo motors in the joint of our large size humanoid robot. These boards drive brushless DC motors(BLDC motors) and DC motors. These boards have cascade control of current control (torque control), velocity control, and position control. And they can drive a motor with high response and high precision. We can control many motors in the joints of a humanoid robot from a micro controller or a PC, using RS485 serial communication.
Brushless DC Motor Control Board

Brushless DC Motor Control Board
The brushless DC motor control board has vector control and can drive a brushless DC motor(BLDC motor) with high efficiency and smoothly. The board has cascade control of current control (torque control), velocity control, and position control. And it can drive a motor with high response and high precision. Because it has torque setting of compliance control, it can change the stiffness of position control of the motor. It adapted to control the brushless DC motor under the power 100[W].
Test Result
These figures are the result of current control of our brushless DC motor control board. These are three-phase voltage command wave, measured three-phase current wave, and current (torque) responce wave.
-
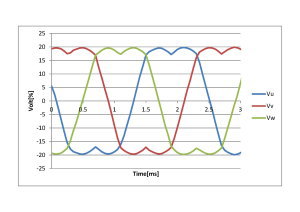
- Three-phase voltage command
-
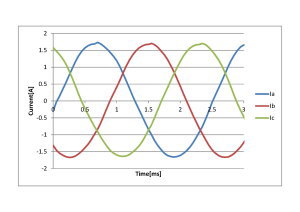
- Measured three-phase current
-
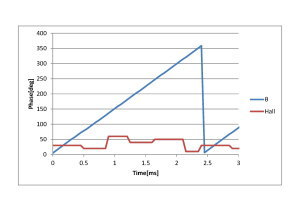
- Phase and hall sensors
-
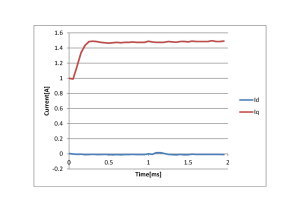
- Current Iq, Id responce
DC Motor Control Board

DC Motor Control Board
The board has cascade control of current control (torque control), velocity control, and position control. And it can drive a motor with high response and high precision. Because it has torque setting of compliance control, it can change the stiffness of position control of the motor. It adapted to control the DC motor under the power 100[W].