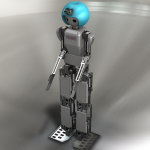
Middle size humanoid robot can afford to the size and weight that can be mounted equipment such as a small PC and cameras.The weight of the robot is about 10 [kg] and light, so that it is relatively easy to operate and test it.
The controller and system configuration is the same in all sizes of the robot, so that it is easy to migrate to small size to medium size robots.
The mainstream of the middle size robot is now “HAJIME ROBOT 39”.
The robot has high torque servo motors made by Vstone in the legs.
A parallel link mechanism in the legs is adopted to improve walking accuracy.
It is possible to change the actuators from Vstone servo motors to Robotis or Futaba servo motors.
We sell a platform kit for RoboCup humanoid league Teen size. The user won at RoboCup 2010 (CIT Brains at RoboCup 2010).
-

-
HAJIME ROBOT 39
CIT Brains at RoboCup (Chiba Institute of Technology)
Specifications
| HAJIME ROBOT 39 | |
| Height | 1000[mm](3.28[ft]) |
| Weight | 10[kg] |
| Degrees of Freedom | 17 (Legs: 10, arms: 6, head: 1) parallel link in the legs |
| Frame | Aluminum plate, Carbon-fiber reinforced plastic (CFRP) |
| Actuators | Servo motors VS-SV3310, VS-SV1150 (Vstone), MX-28R (Robotis) |
| Sensors | Gyroscopes (3-axis) Accelerometer (3-axis) |
| Motion controller | HAJIME Controller HC (ARM Cortex-M4) |
| Autonomous controller (Option) | PC board |
| Camera (Option) | USB Camera with wide lens |
| Batteries (Option) | Lithium polymer battery(Li-Po) 14.8[V] |
| Development environment for motion controller | Cross C compiler, RTM (real time monitor), MLD (motion loader), C source program |
| Development environment for autonomous controller (Option) | Windows OS, Microsoft Visual Studio |
| Features | High-speed walking All directional walking Ball kicking |
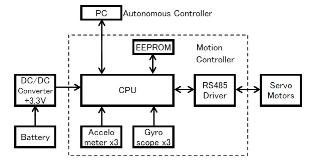
System configuration of the humanoid robot
-

- CIT Brains at RoboCup (Chiba Institute of Technology)(outer design is by CIT Brains)
-

- How to adjust the middle size humanoid robot
-

- 3D CAD design of HAJIME ROBOT 39
-
- 3D CAD design of HAJIME ROBOT 36 with outer design
Videos