High performance humanoid robot is used as a platform for autonomous humanoid robot (biped robot).
The mainstream of the small size robot is now “HAJIME ROBOT 46(HAJIME ROBOT 42)” and “HAJIME ROBOT 49(HAJIME ROBOT 30)”.
The actuator of HAJIME ROBOT 46(HAJIME ROBOT 42) is the servo motor made by Futaba.
A parallel link mechanism in the legs is adopted to improve walking accuracy.
The actuator of HAJIME ROBOT 49(HAJIME ROBOT 30) is the servo motor made by Robotis. A standard serial link mechanism in the legs is adopted.
We sell a platform kit for RoboCup humanoid league Kid size. The users won at the international robot soccer contest “RoboCup”.
-
-
HAJIME ROBOT 30
Darmstadt Dribblers at RoboCup (Technische Universität Darmstadt)
-

-
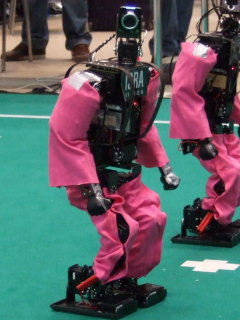
HAJIME ROBOT 42
CIT Brains at RoboCup (Chiba Institute of Technology)
Specifications
| HAJIME ROBOT 49 (HAJIME ROBOT 30) |
HAJIME ROBOT 46 (HAJIME ROBOT 42) |
|
| Height | 550[mm] | 600[mm] |
| Weight | 3[kg] | 3[kg] |
| Degrees of Freedom | 21 (Legs: 12, body: 1, arms: 6, head: 2) |
18 (Legs: 12, arms: 4, head: 2) parallel link in the legs |
| Frame | Aluminum plate | Aluminum plate, Carbon-fiber reinforced plastic (CFRP) |
| Actuators | Servo motors MX-28R,MX-64R (Robotis) |
Servo motors RS405CB (Futaba) |
| Sensors | Gyroscopes (3-axis) Accelerometer (3-axis) |
Gyroscopes (3-axis) Accelerometer (3-axis) |
| Motion controller | HAJIME Controller HC (ARM Cortex-M4) | HAJIME Controller HC (ARM Cortex-M4) |
| Autonomous controller (Option) | PC board | PC board |
| Camera (Option) | USB Camera with wide lens | USB Camera with wide lens |
| Batteries (Option) | Lithium polymer battery(Li-Po) 7.4[V] x2 | Lithium polymer battery(Li-Po) 11.1[V] |
| Development environment for motion controller | Cross C compiler, RTM (real time monitor), MLD (motion loader), C source program | Cross C compiler, RTM (real time monitor), MLD (motion loader), C source program |
| Development environment for autonomous controller (Option) | Windows OS, Microsoft Visual Studio | Windows OS, Microsoft Visual Studio |
| Features | High-speed walking All directional walking Ball kicking Getting up after falling |
High-speed walking All directional walking Ball kicking Getting up after falling |
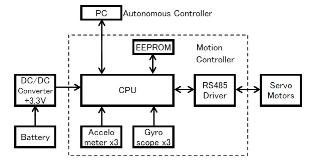
System configuration of the humanoid robot
-

- International soccer robot contest “RoboCup”
-

- Biped robot battle contest “ROBO-ONE”
-

- HAJIME ROBOT 18 (2006)
-

- HAJIME ROBOT 15 (2005)
-

- HAJIME ROBOT 11 (2004)
-

- HAJIME ROBOT 9 (2003)
-

- HAJIME ROBOT 5 mastered Chinese Tai-chi (2003)
-

- HAJIME ROBOT 4 achieved two consecutive wins at ROBO-ONE Bandai cup (2003)
-

- HAJIME ROBOT 2 walked in static walk and walked stairs (2002)
-

- HAJIME ROBOT 1 : walking test robot (2002)
Videos